Introduction: How to Make RC Plane




We love RC toys, especially RC planes. You can easily buy one, but you can't personalize it. So why not to make it? In this instructable I'll show you how to make fully working RC plane.
Where to start?
There are two ways: you make the whole fuselage on your own, or you can buy fuselage and only add electronic parts to it.
The first way is much harder but you can design any RC plane you want. If you don't have a CNC machine or a laser cutter (you can also print parts on 3D printer) it will be very hard to make good plane, but if you have a lot of time you can try. You can find many useful informations about planes and other RC flying toys on this site - there you can also find how to easily make the fuselage (thanks to peabody1929 for the link :)
The second way is a little bit easier, because you don't have to care about aerodynamics, but your plane doesn't have a unique design. I chose this way because I had old RC sailplane.
Please read whole instructable before you start making your RC plane.
Step 1: What You Need?
Electronic parts:
- 2x Arduino(I used Nano) - first is for RC plane and second is for the transmitter
- servos - if you don't have any servos with your fuselage (if you bought it) you will need at least 3 servos (two in the wings, and one for elevator) - I'll tell you more about plane control in fourth and fifth step
- transmitter and receiver
- brushless motor, ESC and battery - in step I'll tell you more about brushless motors, ESC and battery
- 2x potentiometer - more about it in 6th step
- joystick - my joystick is different, but this joystick is probably more accurate
- RGB common anode led - to indicate battery level
- 470 Ω, 100 kΩ and 680 kΩ resistors
- voltage regulator - more about it in step 8
- switch
- batteries for transmitter
- wires
- wires MALE to FEMALE
- pins for Arduino
- PCB board with holes
Other parts:
- fuselage - as I said before you can make it on your own or buy it (for example from here)
- screws
- propeller - more about propellers in 6th step
- motor mount
- hook and loop fastener
other parts you need to make the fuselage or to complete it
You will also need:
- soldering iron
- solder
- screwdriver
- scissors
- hot glue gun
- hot glue
- heat shrink
- 3D printer (you don't have to have it but it's really helpful, especially if you want to build transmitter on your own)
Skills needed:
- soldering
- basics of programming Arduino
3D drawing (not necessarily)
and others needed to make the fuselage (they depend on which way of making you chose)
Everything costed me about $65 (I didn't add the cost of the fuselage, because I got it for free, and cost of batteries for transmitter).
At the end of this instructable I added step "What I would change?". Before you will buy parts for your RC plane, please read it. In the last step I also describe some terms which I don't know if I'm writing it correct (I'm not a native speaker).
Step 2: Forces Acting on an RC Plane

Depending on which type of airplane you would like to make, fuselage and wings might vary. Fast planes (like jets or sport airplanes) have to have shorter wings and slimmer fuselage to minimize drag. Also wingspan should be smaller or equal to the length of the fuselage. Really fast airplanes have wings in the shape of delta (like Concorde). However, sailplanes need a huge wing area to fly because flies at low speed. Also proportions between length of fuselage and wingspan changes. Wingspan is about 2 times (or more) longer than the length of the fuselage.
You may ask how it is possible, that sport planes flies with so small wing area compared to sailplanes?
It's because of their speed. If you are flying a sport or aerobatic plane you fly at high speed and you experience huge overload. If you look at thelift equation: L = 1/2 * ρ * v^2 * A * Cl where L is lift force, ρ is air density, v is true airspeed, A is wing area, Cl is the lift coefficient (usually determined experimentally); you see - more speed, more lift. There is another reason. If you would have huge wings forces acting on them while performing a barrel roll would be so strong that would break them. But how you can increase speed?You can do it by increasing thrust.
Already we know three forces acting on an airplane - drag, thrust and lift. Drag is opposite to thrust. So what is opposite to lift? Lift makes an airplane fly and gravity makes it fall. Now we know four forces acting on an airplane.
If you are designing the fuselage of your RC plane, you have to remember about these forces. Also, if you buy fuselage you have to make sure your motor will make enough thrust to speed your airplane up enough to produce enough lift to fly. But don't worry about it now, we will focus on it later.
You can find more informations about airplanes here.
I took the image from this site. There is also many useful informations about airplanes.
Step 3: My Fuselage











I added this step for those who are making the fuselage for their own. I added few photos which might be helpful for you, no matter what kind of plane you gonna make.
As you may see I can disconnect wings from the fuselage. In right wing is a carbon tube which, when we connect the wings to the fuselage, goes through the fuselage and into another wing where it is attached to the wing using screw. It's useful if your plane has big wingspan (> 1m) but if you have small and fast plane, it isn't recommended because it reduce strength of construction.
Servos mounted in wings control ailerons by pulling and pushing on the wire which is connected to the aileron. The servo is connected to the wire with airplane pushrod linkage.
More about flight control of the RC plane in the next step.
Step 4: Controlling Flight and Some Words About Servos

How to control flight?
If you want to fully control your airplane you need control surfaces. By moving the control surface you can fly up, slow down or turn. To move control surfaces we use servos. To control flight in 3 dimensions you need rudder, elevator and ailerons. You can also use flaps to generate more lift if you fly slowly or to slow down before landing.
But let's talk now about rudder, elevator and ailerons because they are the most important. Each of these surfaces change direction along one axis: rudder change along the vertical axis (yaw), elevator along the lateral axis (pitch) and ailerons along the longitudinal axis (roll).
Which servos are OK?
The best are as light as possible (however sometimes you will need bigger/heavier servo because small servo would not fit to your model). Torque should be from 0.5 kg/cm to 1kg/cm for very small planes (wingspan under 50cm), 1kg/cm to 2.5kg/cm for planes with wingspan above 50cm and under 2 m, for bigger planes use servos with torque above 2.5kg/cm. The rule is: bigger control surface (bigger plane), bigger servo. Also: faster plane, bigger servo. By writing bigger I don't mean heavier, but servo with more torque (although torque and weight are correlated, it doesn't always mean that heavier servo will have more torque).
The speed of the servo is also important, but not as important as torque. Aerobatic planes would need a bigger speed than slow sailplanes. Gears - metal or plastic? Metal is heavier, but more solid (also servos with metal gears are more expensive than plastic servos), plastic is lighter but weaker. If the servo is not overloaded it should work very long (even if it has plastic gears) but servos with higher torque almost always have metal gears. You have to consider it on your own.
There are also analog and digital servos. I always used analog servos so I can't say what is the difference, but I heard that digital servos are more accurate but also more expensive.
Image took from this site.
Step 5: Servos Mounting



Already you know how airplanes fly and how you can control their flight. If you are making the fuselage for yourself, you need to connect inflexible wire to each control surface. If you bought the fuselage you probably have already connected wire.
Assembling servos
To assembly your servos properly, you have to make a bigger hole (2mm) in servo arm to attach airplane pushrod linkage using 2 nuts (on the image is 1 nut, but with 2 it won't loosen up) that pushrod linkage can rotate a little bit. Do it for every servo.
How many servos do I need?
It depends on your model. If you don't have rudder and flaps you need one servo for tail and two for ailerons. If you have rudder, but don't have flaps (as I) you need another one servo for tail. If you also have flaps you need another 2 for flaps. Check which servos are missing in your model. Some models have already mounted servos. My had already mounted servos to control ailerons so I had to add only 2 servos to control airplane tail (one for rudder and one for elevator).
Mounting servos
Now I'll show you how to mount servos to control tail (if you have to mount servos also in wings you have to do it on your own). Look at your fuselage and check is there any special space for servos. If yes, just go to another paragraph, if no, you have to make servo holder. I printed my servo holder (look at image 1 and 2) but you can cut it from any light and solid material. Glue it under wires from elevator and rudder (if you have) using hot glue.
Ok, so you have space to mount servos. If there are no holes you can make them using a small drill (about 1.5mm) - it's just to mark where screws will be. Mount servos using screws (which you should find in servo bag) to the servo holder. The last step is to connect pushrod linkage to the wire. Move each control surface to their neutral position, loosen up the screw which will tighten the wire that you can insert the wire into the pushrod linkage, move servos that their arms will be parallel to each other and perpendicular to the fuselage and tighten the screw in the pushrod linkage.
Checking servo
You've mounted servos to control the tail. Now you should check the range of the servo move. Download the code (at the end of this step, you also need ServoTimer2 library - you can't use the standard Servo library because it will have a conflict with another library which we will use to send data from transmitter to receiver - which you can find at the end of this step). Connect the servo to Arduino: red wire from the servo to 5V on Arduino, black wire from the servo to GND on Arduino and yellow (could be also orange or white) wire from the servo to 9th digital pin on Arduino. Send the code to Arduino. Elevator (or to whatever you connected) should be in the neutral position. Open Serial Monitor (Ctrl + Shift + M) and set baud rate to 9 800. In the text box (on the left from Send button) you can write angle (in degrees) to which servo should move. Find the biggest angle of deflection down and biggest angle up and write it somewhere. Repeat this process for every servo (angle of deflection of each aileron should be the same). It will be really helpful when we will program receiver.

Step 6: Motor, Propeller, ESC and Battery
Motor
First of all, it should be brushless motor. You can use brushed motors, but they are not recommended for RC planes.
Second of all, if you are going to use your plane outside you have to choose an outrunner motor (I don't really know what is the difference between outrunner and inrunner but everyone says that outrunner is to run outside and inrunner is to run inside - in a house for example).
If you will look into the brushless motor datasheet (example) first you see is Kv (in our example is 2750 Kv). You can see Kv as RPM per volt but it is not really the same (here you can read deeper explanation). Next is battery and after it is 3 ~ 4S. S means "how many cells in series" (this indicates which battery pack is suitable for your motor, but I'll tell you later about it). If there is 4S that means you need to connect 4 lipo cells in series (GND of one battery to VCC of another battery). If you connect batteries in series their voltage is adding. 1 lipo cell has max voltage of 4.2V. To calculate the max input voltage to your motor just multiply 4.2V times 4 and you get 16.8V. If you know the max voltage you also know max RPM. To estimate (real value will be lower) you can multiply max voltage by Kv, in our example, you get 16.8V * 2750 RPM/V (Kv) = 46200 RPM.
Next is which propeller is recommended for your motor. It is only sugestion, you don't have to use the same propeller as in the datasheet (I'll tell you about propellers later). After that is the maximum power of your motor in watts (W). Note that power is different for different number of cells in series (voltage). That's because the formula for power is: voltage (V) * current (A) = power (W). After power of motor is current draw in ampers (A). Remember this value because depending on it you will choose ESC (but about it later). Next is direction: CCW - motor rotates counter-clockwise, CW - motor rotates clockwise. And below it are dimensions of your motor. Different motors have different sizes. Choose proper one for your plane. Remember the shaft because it will be necessary to choose a proper propeller.
If you would like to read more about motor go to this site.
If you would like to see more motors go to this site.
Propeller
There are many types of propellers. They can be made of wood, plastic, carbon, etc. There are even glowing in the night propellers. There are propellers to sport flight or slow flight. 2 blade, 3 blade and 4 blade propellers. The most popular are plastic, 2 blade propellers.
But probably the most important is size of propellers. As you may saw in the motor's datasheet that propellers are write number x number (for example 5 x 4.5). The first number is the length of the propeller in inches. The second number (named pitch) is how far (in inches) the propeller will move through the air per single revolution. Higher second value - plane will fly faster. REMEMBER: second value is only an estimate, the real value will be different. However, the first value is not less important. If you divide the first value by 2 you get how high above the ground should be the motor. You should also add half of inch to avoid propeller touching the ground.
Many propellers have adapters to adapt to many sizes of motor shafts. Check if there is adapter to your motor's shaft or maybe hub fits your shaft - then you don't need adapters. The last thing is if propeller moves clockwise (CW) or counter-clockwise (CCW). If your motor moves clockwise you choose clockwise propeller.
If you would like to read more about propellers go to this site.
If you would like to see more propellers go to this site.
ESC
ESC stands for Electronic Speed Control. It controls the brushless motor. We will now focus only on ESCs for planes. The main task of ESC is to control the speed of the brushless motor. You can send data to ESC as you send data to servo using function write (PPM). You can program properly your ESC by sending to it high and low pulses (high pulse is about 2000 microseconds and low pulse is about 1000 microseconds). Go to the datasheet of your ESC and check how you can do it. Everything should be set properly by default. I encourage you to check your ESC and motor before mounting it into the plane. To do it, I made instructable "How to buy and control brushless motor".
Now let's look at an example. First is Cont (Continues) Current (40A in our example). This indicates how much current you can draw from ESC to power your motor. ESC cont current should be should be a little bit (about 10-20%) higher than maximum current draw of motor. After that is Burst Current (55A in our example). You can draw burst current from your ESC for about 10 seconds and ESC won't burn (theoretically). However, if you will draw more current or longer than predicted ESC can burn.
Next is BEC (Battery Elimination Circuit). BEC changes the high (relatively) voltage on batteryto 5V (mostly) to power the receiver and servos. BEC also read voltage on battery and if the voltage too low it turns off the motor but still assure power to the receiver to land safely. BECs are not in all ESCs but in most of them. If you would like to read more about BEC go to this site.
Below BEC is LiPo cells (2 - 6 in our example). It's the same as S in the motor's datasheet. If motor's battery is in the range of LiPo cells the ESC is OK.
After it are NiMH (it's other type of battery), weight and size.
ESC Connection: From one side of ESC goes two thick wires (one red and one black). It's to the battery. From the same side also goes three thin wires to the Arduino. From the opposite site goes three thick wires (of the same color). These wires go to the motor (order doesn't matter). If motor rotates in wrong direction switch two side wires.
If you would like to see more ESCs go to this site.
Battery
Battery provides power to the ESC. There are many types of batteries but the most common now is Li-po. We will use actually battery pack because it consist many cells, not just one. Each li-po cell has 3.7V. Let's look at the example of the battery pack.
First is Capacity (1300mAh in our example) in milliampere-hours (SI unit of capacity is Coulomb but everyone use mAh to describe the capacity of battery). Formula of capacity is current * time = capacity, which means if you want to draw 2600mA for 30 minutes (0.5 hour) you need capacity of 1300mAh. If you have a battery with capacity of 1300mAh (1.3Ah), you have a motor which draws maximally 35A so average it takes half of its maximum draw - 17.5A. To calculate how long you will fly divide 1.3Ah by 17.5A and you get 1.3Ah / 17.5A = 0,074h = 4 minutes 27 seconds
Next is voltage. 3S1P means 3 cells in series (this is the S) and 1 parallel. You know what happens with voltage if you connect cells in series, but if you connect batteries in parallel you don't add voltage - you add current. 3 cells are the same as 3S. 11.1V is equal to 3.7V * 3 (S). So you saw three ways of writing the same thing.
After voltage is discharge rate. In our example is 45C constant / 90C burst. C means discharge rate - how many times more current you can take from the battery than its capacity. If the capacity of the battery is 1.3Ah (1300mAh) and discharge rate is equal to 45C you can take from this battery 1.3Ah * 45C = 58.5A. For a short amount of time you can take from battery 90 times the capacity of the battery (burst discharge rate is equal to 90C).
Below discharge rate are many useful informations about the battery. Also, there is a discharge plug to which you will connect your ESC. You need to buy the same discharge plug as is connected to the battery (but female not male) and solder it to red and black thick wires which goes from the ESC.
If you would like to read more about batteries visit this site.
If you would like to see more batteries go to this site.
Step 7: Making Receiver and Mounting All Stuffs in the Fuselage















I added few photos which will help you if you are confused with any step.
Soldering wires to the servos in wings
I had to solder three wires MALE-TO-FEMALE to each servo and isolate the wires using heat shrink but you probably don't have to do this.
Finishing front
In front of the fuselage as you may remember from third step I had big hole instead of a nice and aerodynamic front. So I had to fix it. I cut off a block of styrofoam and after half an hour of work I changed it into something more aerodynamic. I screwed my motor to it using screws to the wood. But now I know that it was a bad idea. While first try of motor it broke free so I screwed into the front of the fuselage some screws to styrofoam and covered the front with resin with fiberglass. It is a little bit heavier, but also more solid. If you bought the fuselage you should have full beautiful front.
Mounting the motor
There are three possible positions for motor: in front, above the fuselage and in the tail (wings). I mounted it in front, but similar process is for every position. You should have a mount with your motor. Screw the mount to the motor and then mount with motor to the front that it is on the longitudal axis (look at the image in step 4). Make a hole in the front (if there isn't any hole) for the wires, put the heat shrinks on them and solder it to the wires from the ESC (this three thick wires of the same color). Check if the motor moves in the proper direction, if not switch side wires, now check again (just to make sure). If everything is OK heat the heat shrinks. Now the wires from your motor are isolated and the plane is almost ready to fly.
Making the receiver board
Now get an Arduino, PCB board with holes and 18 pins. You have to make the receiver board. Look at sixth image. There is a circuit diagram and on the 7th image are shown roads on the board which you can make using wires and solder. On 9th image you can see how my roads look. They are not so pretty, but works. Check using a digital multimeter whether every pin is connected to the proper pin on the Arduino and check if there aren't any short circuits.
If you've made the board for Arduino solder three MALE-TO-FEMALE wires to the RF receiver as shown on image 10.
Hook and loop fasteners
You need to fasten using hook and loop fasteners Arduino board, ESC and the battery (look at the images 11 and 12). I had to fasten the ESC on the side of the fuselage and the Arduino board at the end of the first part of the fuselage (I hope you know what I mean :) using a single strap but use two straps for the battery. Glue the hook and loop fasteners to the fuselage and other parts using hot glue.
Wires and the roof
Mount the RF receiver as far from the front of the fuselage as possible. Move its wires under the servos which control the tail of the Arduino board. Make a little recess in the bulge (between the servos and the first part of the fuselage) for wires from servos and the RF receiver. If you have (as me) disconnectable wings connect them now. Download the code for receiver and send it to the Arduino on the receiver board (you can find the code at the end of this step, you also have to download the VirtualWire library which you can also find at the end of this step). Connect the wires to the right pins. Also you can now fasten the battery.
The last thing you need is a roof. I didn't make a very solid roof, but if you bought the fuselage the roof is with it.
Attachments
Step 8: Transmitter





















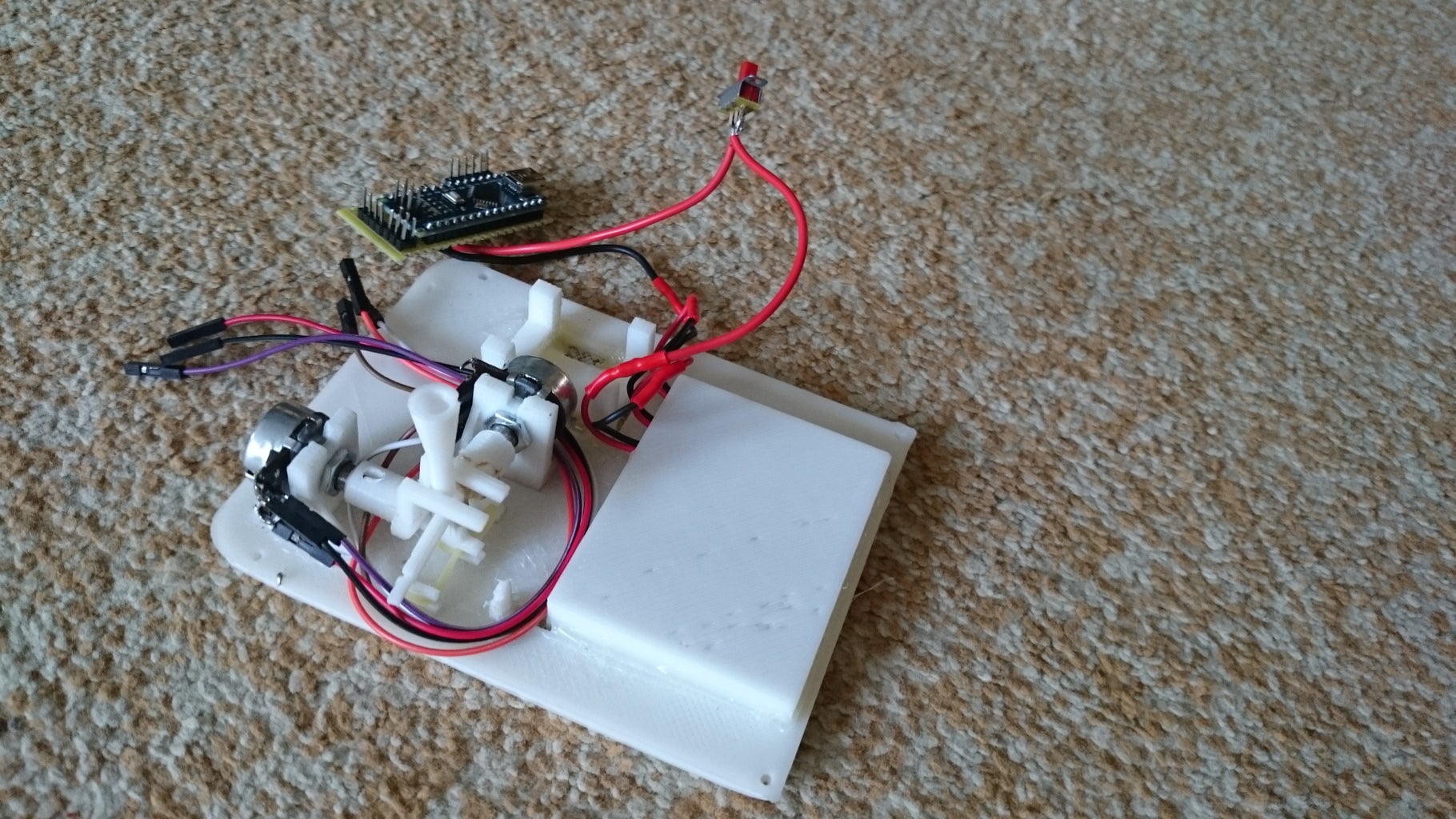


This is the worst transmitter that you have ever seen. I'll add instructions how to make it later (or I'll redesign it). At the end of this step you can download all parts in STL and sldprt (SolidWorks) (you can also find there the code for the transmitter). You have to make it from the photos.
I added external voltage regulator because voltage regulator in Arduino has burned out.
Don't connect the led now - it doesn't work.
If you've made the transmitter please post link to it in the comments.
Step 9: First Flight
I won't add now any videos from the first flight because my plane has crashed :(
It worked great, I took-off, but there was a problem with landing. Plane hit the ground and ESC burned out because motor didn't turn off and drew a lot of amperes because it couldn't move the propeller.
Step 10: What I Would Change?
First of all, I would raise the fuselage. I would also buy better motor and ESC. Maybe I would change the battery to smaller at mount it somewhere lower.
Second of all, I would change servos. My servos has to small torque and sometimes are buzzing strangely.
Last thing I would change is the transmitter. It has to low range (about 150m). Now I bought this transceiver. It should be better :)
There are some things that I don't know how to name: the wire (step 5), aileron pushrod linkage (step 5 - I hope that it's the correct name) and hook and loop fasteners (step 7 - I also hope that it's the correct name).
If you will find any language mistake, please send me Private Message - I will correct it.
I hope you liked it. Good luck with making your RC plane.
Hope to see you soon :)