

Introduction: Plotter and Laser With Raspberry Pi CNC Hat





Have you ever thought of putting together a laser plotter using a Raspberry Pi CNC Hat? We do precisely this in our project today. I’ll introduce you to an XY table, which is the basis of this "printer,” which serves both to record and cut certain materials, and involves the whole assembly process in the mechanical part.
For our project, we use a 15-watt laser. Also, we’ll use the GRBL, but in a different way, as it’ll be with the Raspberry Pi 3. And instead of using an Arduino Uno, as is usually the case, we’ll use a Hat from Protoneer (Electronic Prototyping Specialists), which is like a Shield for the Raspberry.
Step 1: Demonstration

In the video, I show the XY table as a plotter, using a pen. However, if the pen were a spindle, we would have a milling machine, which is a machine with continuous movement, destined for the machining of materials. We have a circuit that passes the design through Raspberry Pi and Hat, which means we don’t need a PC to control the machine. The table was assembled with some 3D printed parts, step motors, linear guides, among other products.
Step 2: Features Used for Table Construction:
- MDF 15mm with 600x556mm with cutout and drilling
- Four 10mm cylindrical guides with 500mm of length
- Four SK10 cylindrical guide holders
- Six GT2 flat pulleys for 6mm belt
- 3200mm GT2 6mm belt for the Y axis (including the excess for lashing)
- 1350mm of GT2 6mm belt for X axis (including the excess for lashing)
- Two 20-gauge GT2 pulleys for the 6mm belt
- Two NEMA 17 Motors (we use the 42BYGHW609)
- One CD-ROM drive (we use MSDA020L94 removed from an old drive)
- Four LM10UU bearings
- Two infrared sensors to limit switches X and Y
- One compatible pen for the stand
- One cursor pen spring
- One source of 12V 10th
Step 3: Features Used for Table Construction (nuts and Bolts)
- Twelve M5x25 screws
- Eight M5 self-locking nuts (parlock)
- Six 3/16 screws "x 1 ¼"
- Twelve 3/16 nuts "x1 ¼,” self-locking (parlock) screws
- Sixteen M3x8 screws
- Two M3x16 screws
- Six M3 self-locking nuts (parlock)
- One 3/16 "x ½" screw
- Five superb threaded screws, and five 5mm long flat head screws for fixing the motor
Step 4: Printed Parts Used for Table Construction:

A - 2 Latch Strap.
B - 1 Cable Holder 01_A.
C - 1 Cable Holder 01_B.
D - 2 Cable Holder 01_C.
E - 1 Rasp Protection.
F - 1 Engine Support.
G - 1 Plastic Pillow (with engine mount).
H - 1 Plastic Pillow (WITHOUT motor attachment).
I - 1 Pen Head.
J - 1 Extender.
K-1 Cursor.
L - 1 Fixing Cursor.
Step 5: Head Mounting











It is very common for people to use a servomotor for this type of assembly, but I prefer to use the scrap motor. This driver motor already has a mini-tip.
1. Place the LM10UU bearings in part (part I). This will be the head that will carry the pen. The bearings should come under a pressure that should keep them fixed. It was necessary to slightly adjust the holes using a round file, due to the printing variations.
2. We fasten the motor mount we use as the Z-axis. We use five superb 5mm long screws directly on the plastic.
3. Hold the motor in the holder, taking precautions when placing the cursor (part K) before attaching it.
4. The slider has a notch for inserting a blade that will go with the motor spindle. We used a plastic blade and glued it. If it is damaged, another can replace it.
5. Using the appropriate pen for the hole, insert the spring and the fastener (part L).
6. Use an M3 screw to secure the pen in position.
7. Finally, we set up the infrared sensor that will serve as the X-axis limit switch.
8. We use the extender (part J) to further limit the tip of the pen. The extender has been pasted.
9. The head is like this.
Step 6: Mounting the Plastic Pillow With the Engine Bracket





1. The plastic pillow with motor mount is G. We begin by introducing the LM10UU bearing. It should come with light pressure. Adjustments were required due to printing variations. Photo15
2. Next, secure the motor and the cable holder (part D). We use M3 screws.
3. We also secure the toothed pulley.
4. The end result should be this.
Step 7: Mounting the Plastic Pillow WITHOUT Motor Support





1. Like before, we introduce the bearing.
2. Then, screw the 3/16 "x 1 ¼" to serve as the spindle for the flat pulley. To lock it, we use the self-locking nuts. Note the inversion of the upper nut.
3. Then, we get the second pillow.
4. We connect the X-axis guides, but without any adjustment. Correct positioning should be performed when mounting the assembly on the Y-axis.
Step 8: Mounting the Y-axis










In first picture we have the frame.
1. We start with the Y-axis motor. Hold the toothed pulley in the indicated position, keeping a distance of approximately 1.6mm to the motor.
2. Pay attention to the position of the motor and toothed pulley.
3. Then, fasten the motor to the Y-axis motor support (part F), using M3 screws as indicated.
4. Fasten the base bracket with M5 bolts, directly bolted to the plastic of the bracket.
5. The next step is to fasten all guide rails, SK10, following the drilling of the base.
6. To form the axis of the smooth pulleys, we use the same assembly applied to the pillow without a motor. For this, we use 3/16 "x 1 1/4" bolts with two self-locking nuts. We repeat the process for each hole marked on the base.
7. Finally, we attach the infrared sensor, which will serve as the limit switch for the Y-axis...
8. There are extra holes for the possibility of including limit switches for the maximum positions.
9. ... And then there is the cable holder (part D).
Step 9: Mounting the Assembly

With all the axles assembled, we were able to put them together. At this moment, the X-axis guides must be adjusted for the assembly to function properly.
Step 10: Passing the Straps


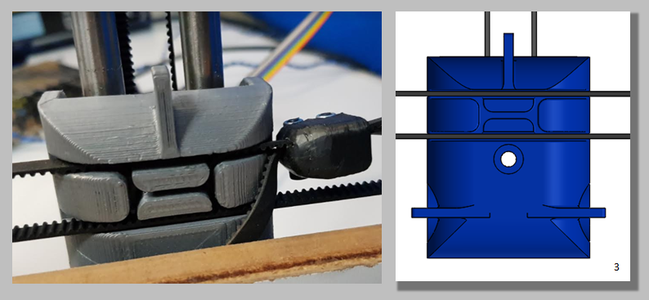


The head and pillows have a notch in the lower part where one side of the belt must pass freely, and the other must be deflected.
In the case of the pillows, the sides that deviate must always be equivalent in direction.
We use the belt locks (part A) to lock the belt ends. It is beneficial to twist the longer side of the belt so that the teeth fit into the lock, thus avoiding slipping. The latch can be tightened using two M3 bolts and self-locking nuts.
The belt system should look like the image number 5.
Step 11: Last Bracket

We installed the last cable rack over the head.
We use a 3/16 screw to secure it.
Step 12: Completing the Assembly


We have now included the protection for Raspberry Pi. As can be assumed, this serves for your protection. This completes the assembly.
