Introduction: 3.5 $ P.I.R. Arduino Intruder Alarm







Passive infrared sensors are great for motion detection projects, i brought it recently for a college project and i was actually being tempted to use it .
Unfortunately all i got from The INTERNET were not that much fun .
I took out some of my favorite old parts and started tinkering with it .
The result was a motion detected Intruder alarm.
I added two led to simulated police siren light and added Siren to it for the real fun.
The sensitivity was made to medium values , and then the fun began .
Note this might look like an egg according to my Girl Friend dont try to boil it and eat it :P
Step 1: Ingredients




So for this project we would need
- Arduino UNO(compatibles ones work too);
- 1x Blue Led
- 1x Red Led
- PIR Sensor
- 12 V Siren
You will also need a powerbank as a power source
i used the one i made .
you can also make one
https://www.instructables.com/id/Powerduino-1-Powerbank/
Step 2: About the PIR Sensor




PIRs are basically made of a pyroelectric sensor.The one above as the round metal can with a rectangular crystal in the center.It can detect levels of infrared radiation. Everything emits some low level radiation, and the hotter something is, the more radiation is emitted. The sensor in a motion detector is actually split in two halves. The reason for that is that we are looking to detect motion (change) not average IR levels. The two halves are wired up so that they cancel each other out. If one half sees more or less IR radiation than the other, the output will swing high or low.
There are two Trimmer in the PIR sensor this pots adjust the delay time and the sensitivity ,individually i added the note in the 3rd pic for references.
There is also a jumper for selecting the trigger mode ,
There are two trigger modes
H (re trigger ):Output remains high when sensor is triggered repeatedly and low when idle.
L (Normal ): Output goes hig to low when triggered .Continous motion results in repeated high low pulse
Step 3: Connecting the Sensor and the Components
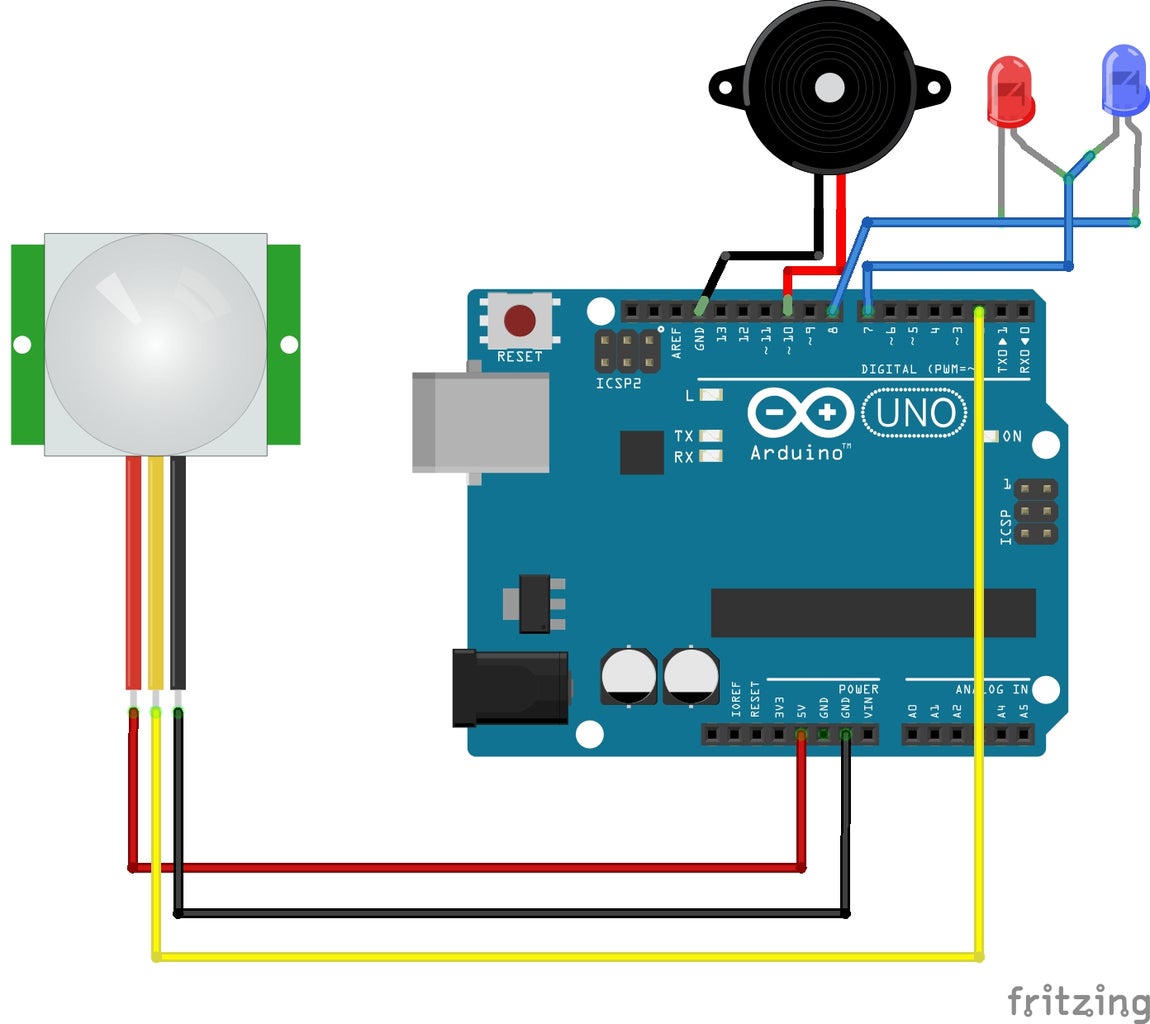




The PIR sensor has three pins
- Vcc
- Data
- Ground
so the connections are simple we connect
Vcc to 5v
Gnd to Gnd
Data to 3
Now for the siren
Connect
positive to pin 11
Gnd to Gnd
Lastlat the Led are connected to 7 and 8
Step 4: Coding Time




About the code .
int calibrationTime = 45;
//the time when the sensor outputs a low impulse
long unsigned int lowIn;
//the amount of milliseconds the sensor has to be low
//before we assume all motion has stopped
long unsigned int pause = 5000;
boolean lockLow = true;
boolean takeLowTime;
int pirPin = 3; //the digital pin connected to the PIR sensor's output
int ledPin = 11;
int led1=8;
int led2=7;
/////////////////////////////
//SETUP
void setup(){
Serial.begin(9600);
pinMode(pirPin, INPUT);
pinMode(ledPin, OUTPUT);
pinMode(led1,OUTPUT);
pinMode(led2,OUTPUT);
digitalWrite(pirPin, LOW);
//give the sensor some time to calibrate
Serial.print("calibrating sensor ");
for(int i = 0; i < calibrationTime; i++){
Serial.print(".");
delay(1000);
}
Serial.println(" done");
Serial.println("SENSOR ACTIVE");
delay(50);
}
void alert()
{
digitalWrite(led1,HIGH);
digitalWrite(led2,LOW);
delay(50);
digitalWrite(led2,HIGH);digitalWrite(led1,LOW);
delay(50);
}
void loop(){
if(digitalRead(pirPin) == HIGH){
analogWrite(ledPin, 50);
alert();
digitalWrite(led1,LOW);
digitalWrite(led2,LOW);
;//the led visualizes the sensors output pin state
if(lockLow){
//makes sure we wait for a transition to LOW before any further output is made:
lockLow = false;
Serial.println("---");
Serial.print("motion detected at ");
Serial.print(millis()/1000);
Serial.println(" sec");
delay(50);
}
takeLowTime = true;
}
if(digitalRead(pirPin) == LOW){
digitalWrite(ledPin, LOW); //the led visualizes the sensors output pin state
if(takeLowTime){
lowIn = millis(); //save the time of the transition from high to LOW
takeLowTime = false; //make sure this is only done at the start of a LOW phase
}
//if the sensor is low for more than the given pause,
//we assume that no more motion is going to happen
if(!lockLow && millis() - lowIn > pause){
//makes sure this block of code is only executed again after
//a new motion sequence has been detected
lockLow = true;
Serial.print("motion ended at "); //output
Serial.print((millis() - pause)/1000);
Serial.println(" sec");
delay(50);
}
}
}