

Introduction: ROVER Bot - the Arduino Bluetooth Controlled Tank








Arduino Bluetooth ROVER Robot
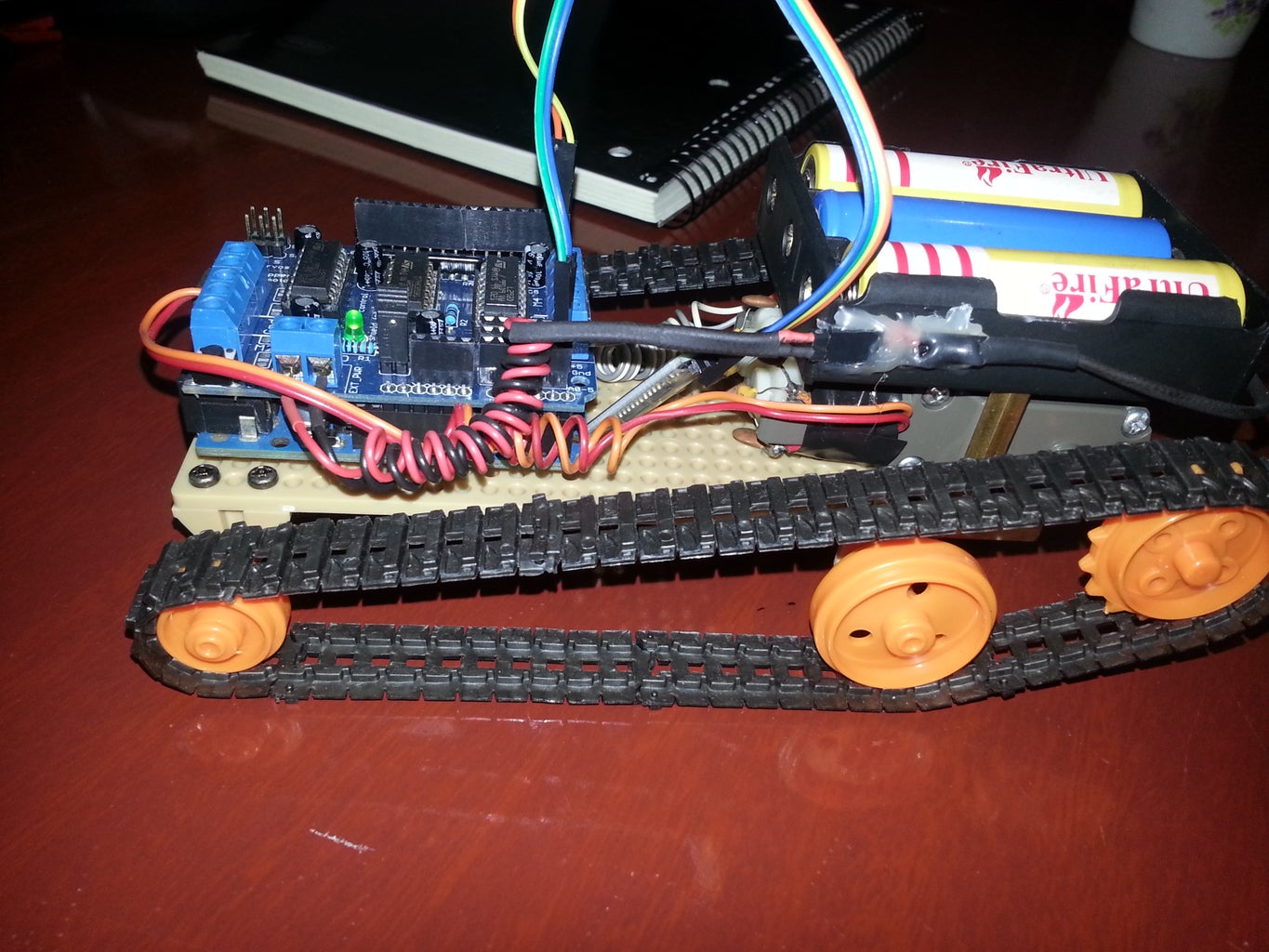
The Arduino ROVERBot. This post aims to present you the construction steps of a ROVER using the Arduino and a bluetooth module. To control the ROVER it was used a Android phone as RC (radio control) interface. The Android application used is the "Arduino Bluetooth RC Controller" which is available on the "Play Store". This application provides a way of control by directional buttons or via digital positioning (accelerometer) of the cell phone itself that is being used as a control device.
This is the link to the application control:
https://play.google.com/store/apps/details?id=braulio.calle.bluetoothRCcontroller&hl=pt_BR
This project is based on the "DIY Phone Controlled FPV Rover (Fast & Agile)" by ASCAS.
I would Like to thank ASCAS by this great project. So Thank you!
Step 1: What Will You Need to Build This Project?











MATERIAL:
1 x Tamiya Twin Motor Gear Box - KIT;
1 x Tamiya Tank Chassis - KIT;
1 x Arduino UNO R3 or MEGA;
1 x Bluetooth Module HC-05 or compatible;
1 x Adafruit DC-Motor-Shield;
1 x Battery 11.7 V / 3500 mAh;
For more information about the controller Adafruit motor shield, visit the website below, where you can also get the library used in the project.
https://learn.adafruit.com/adafruit-motor-shield/overview
MOUNTING:
Watch the video below to know exactly how to assemble the Tamiya Gear BOX KIT.
Step 2: Electronics Interconnections





INTERCONNECTIONS
After the "Tamiya Geat Box" and "Tank Chassis" have being mounted, you can begin to start the electronics interconnection.
The diagram shows how the connections should be made. In a short description we have:
1 - Plug the Adafruit Motor Shield on Arduino;
2 - Connect the Bluetooth module: -
RX bluetooth module pin connected to the Arduino TX pin (pin 0);
TX Bluetooth module pin connected to the Arduino RX pin (pin 1);
Bluetooth GND pin connected to Arduino GND pin;
Bluetooth VCC pin connected to Arduino +5V pin;
3 - Connect the right DC-Motor to the Motor Shield (motor-1);
4 - Connect the left DC-Motor to the Motor Shield (motor-3);
Here it is worth a note:
The rotation direction should be tested. If reversed, you should revert the DC-motor wires in order to revert the rotation direction.
5 - Connect the Li-ion battery (ground and positive wire) to GND and M+ pins of Motor Shield;
Another Note: The Motor shield junper (PWR) must be closed (in this way the Arduino will be powered by the battery and also the DC-Motors.
Step 3: The Code and Library

CODE
Get all files on GitHub:
https://github.com/Arduinobymyself/ArduinoRoverBot.git
The Arduino should be programmed without the bluetooth module pins (TX / RX) connected to Arduino pins 0 and 1. This would prevent the Arduino to receive the compiled data from the IDE.
If you have any problems with the files mentioned, request via email to:
Step 4: How It Works?

Overall Operation
First, power on the the Arduino ROVERBot. The bluetooth module will start blinking the red LED (indicating that it is not connected to any computer or bluetooth MASTER control);
Open the Application Control on your Android phone, initially it will be disconnected what will be indicated by a red flashing warning; When opened the application, it will asks whether you want to activate the bluetooth device or not (if it is not already enabled); answer yes; Goes to the application options menu, select the "connect" option; The available devices will appear for connection (usually the Arduino bluetooth module is called "LINVOR"), select this device. The green LED should be lit on the Arduino bluetooth module and it will appears a green indication on the application.
Ready! now the cell phone and ROVERBot are connected via bluetooth and the ROVERBot is ready to be used.
Use the arrow keys to move in the different directions allowed.
You can also use the cell phone accelerometer to control the ROVERBot (by moving the cell phone in different directions).
Now! you must just have fun with this great Rover (strong, fast and robust).
Step 5: Video and Photos






Video and Photos
You could see the Rover's performance in this video: http://youtu.be/9B4_5goUybU

