

Introduction: Athena: the Global Car Tracking System(3D Images)












Bring out your 3D glasses and enjoy viewing in a novel way! I have added a new dimension to my instructable. If you do not have 3D glasses, then you can make one yourself. The following link explains how to make 3D glasses ( link ).
Please Note: This instructable contains 3D images which are best viewed with Red and Cyan 3D Glasses. However, for those of you who do not have 3D glasses, this instructable also contains 2D images.
Every year about 700,000 vehicles get stolen in US. In fact, a car is stolen every 45 seconds.
We all love our cars and whether it is a roaring Lamborghini or a purring Prius, we are attached to it and wish that it never gets stolen.
I am very attached to my family car and take lots of precaution that I do not park my car in secluded places or double check that I always lock my car when I park it anywhere and always carry my car keys with me. However, I am still worried whether my car is safe. In order to get rid of these genuine worries, I decided to design my own low cost car tracking system.
In this instructable, I have explained the process of building one's very own Global Car Tracking System -'Athena' - for a cost of just 100$. The steps for building this device is very simple and explained in a lucid manner. The skills required for you to build this is minimum (Basic knowledge about electronics and the Arduino IDE).
I have christened this device by the name 'Athena' because Athena is the Greek Goddess of navigation.
So what are we waiting for.....let's get started.......
Please Note: This instructable contains 3D images which are best viewed with Red and Cyan 3D Glasses. However, for those of you who do not have 3D glasses, this instructable also contains 2D images.
Every year about 700,000 vehicles get stolen in US. In fact, a car is stolen every 45 seconds.
We all love our cars and whether it is a roaring Lamborghini or a purring Prius, we are attached to it and wish that it never gets stolen.
I am very attached to my family car and take lots of precaution that I do not park my car in secluded places or double check that I always lock my car when I park it anywhere and always carry my car keys with me. However, I am still worried whether my car is safe. In order to get rid of these genuine worries, I decided to design my own low cost car tracking system.
In this instructable, I have explained the process of building one's very own Global Car Tracking System -'Athena' - for a cost of just 100$. The steps for building this device is very simple and explained in a lucid manner. The skills required for you to build this is minimum (Basic knowledge about electronics and the Arduino IDE).
I have christened this device by the name 'Athena' because Athena is the Greek Goddess of navigation.
So what are we waiting for.....let's get started.......
Step 1: Parts Needed:












The following is a list of parts needed to build 'Athena' :-
Supplies :
Supplies :
- Arduino Uno
- Arduino GSM Shield (I have used a SIM900 GSM/GPRS Shield Module)
- GPS Module
- Adapter Plug for powering the Arduino
- 4pcs of LM7805 IC
- PCB
- Wires
- Male Header Pins
- Female Header Pins
- Project Enclosure
Tools :
- Soldering Iron
- Solder
- Soldering Wax
- Drill
- Hacksaw
Step 2: The Circuit: Voltage Regulator Circuit






The Arduino and GSM shield operate at voltages between 5 volts and 12 volts. Although the car has a 12 volt battery and electrical system, the voltage can sometimes spike up and damage the Arduino if connected directly. Hence to be on the safer side, I have decided to use an LM7805 Voltage regulator to regulate the 12 volts input voltage to 5 volts. The LM7805 IC generates an output of 5 volts 0.5 amps. Since the GSM module can sometimes draw upto 2 Amperes of current, I have used 4 pcs of LM7805 IC to meet the requirement.
The Circuit :
The Circuit :
- Cut the PCB using a hacksaw into a piece large enough to fit the 4pcs of LM7805 IC (Refer to Pic. 1).
- Arrange the LM7805 in a parallel connection on the PCB (Refer to Pic. 1) and bend the leads of the IC to connect them in parallel(Refer to Pic. 3)
- Solder Wires to the 12v Input of LM7805, Ground Input, 5v Output of LM7805 and Ground Output.
- Connect the Adapter plug to the 5v Output and Ground Output Wires. The final product should look like Pic. 5
Step 3: Preparing the Project Enclosure: Drilling Holes


In this step you will drill the holes to mount the Arduino and the GSM Antenna to the project enclosure.
- Drill four holes at the bottom of the project enclosure to secure the Arduino Uno in it.
- Drill a hole on the left wall of the enclosure big enough for the USB cable to connect to the Arduino.
- Drill a hole on the right wall for the GSM Module Antenna.
- Drill two holes on the right wall for the Power Input wires.
Step 4: Wiring the GPS Module






The GPS module must be connected in a detachable manner to the Arduino Uno. If wires are soldered to the module, then the module cannot be reused for some other application or project. Hence I have used header pins to create a detachable connection between the GPS module and the Arduino. The following are the steps to create a detachable connection:-
- Cut four pieces of wire and solder the male header pins to one end of the wire. Wrap the soldered ends of the wire in insulation tape(Refer to Pic. 3).
- If female header pins are available, then solder the other ends of the wire to the female header pins. (Top tip: If female header pins are not available, then briefly heat the ends of the wire over a candle to partially melt and loosen up the insulation on the wire. Then force each of the wires into the Vcc, Gnd , Tx and Rx pins of the GPS Module. Refer to the Pic. 4)
- After connecting the wires to the Vcc, Gnd , Tx and Rx pins, the GPS module should look like Pic. 6
Step 5: Final Assembly












Now you can assemble all the parts of the Global Tracking System.
- Place the Arduino Uno in the project enclosure and fasten it with screws or zip tie(Refer to Pic. 1).
- Insert the Adapter plug into the Arduino and place the Voltage Regulator Circuit into the enclosure. Insert the Input Voltage wires through the two holes drilled in the enclosure(Refer to Pic. 3).
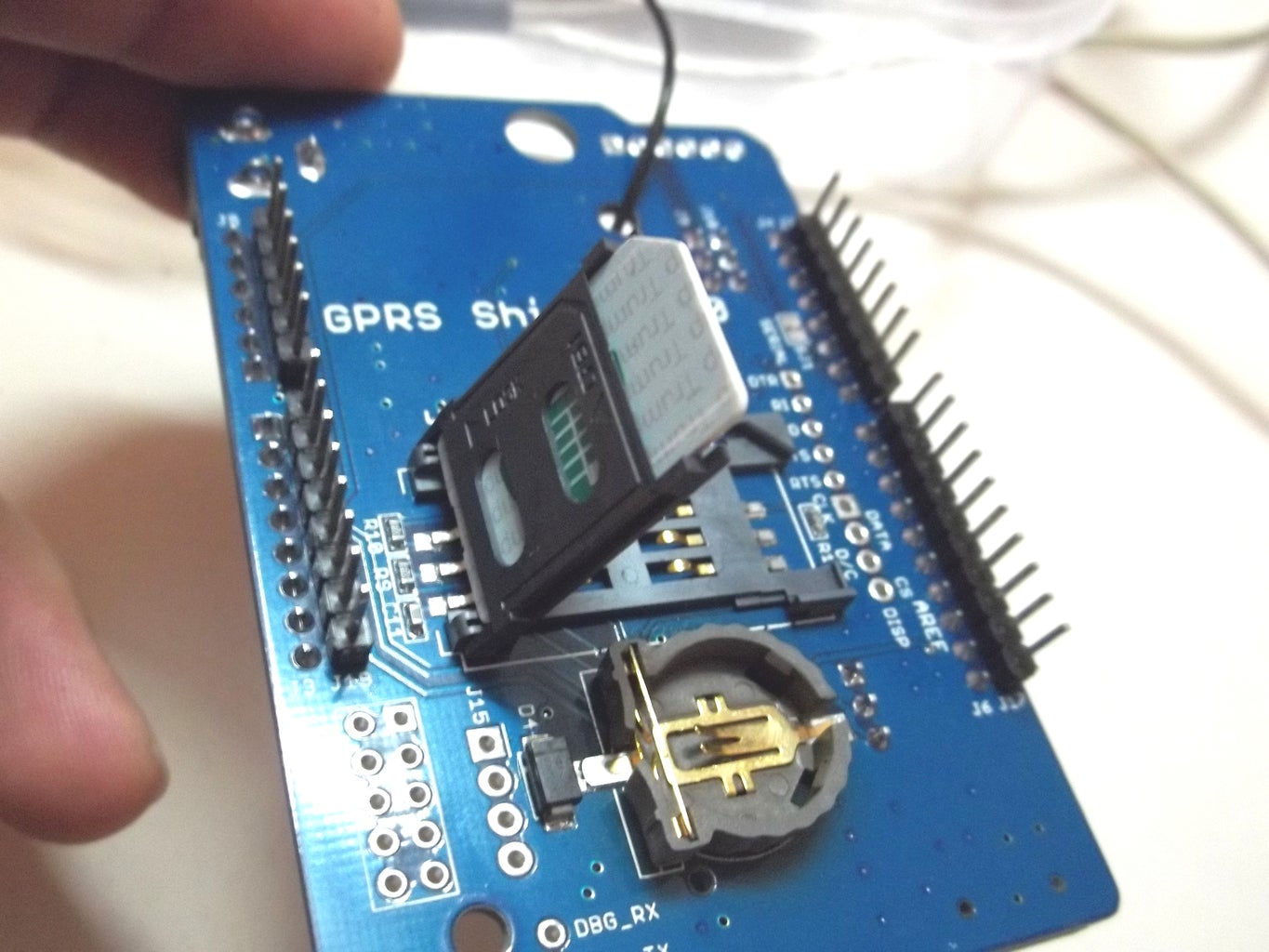
- Screw the GSM antenna in place(Refer to Pic. 5). Insert SIM card into the GSM module and place the module over the the Arduino Uno( Refer to Pic. 7).
- Place the GPS module in the project enclosure and connect it to the GSM shield in the following manner. Connect the Vcc pin from the GPS module to 5v on the GSM Shield. Connect the Gnd pin from the GPS module to Gnd pin on the GSM Shield. Connect the RXD pin from the GPS module to Pin 5 on the GSM Shield. Connect the TXD pin from the GPS module to Pin 4 on the GSM Shield.
Step 6: Programming the Arduino:

Before you can program the Arduino Uno, you must first install the Tiny GPS library for the GPS Module.
These are the steps to install the library :-
The following is the source code for the Arduino. Copy the code below and load it on the Arduino :-
//Program written for Global Car Tracking System by Jayvis Gonsalves
#include <SoftwareSerial.h>
#include <string.h>
#include <TinyGPS.h>
SoftwareSerial Sim900Serial(2, 3);
byte buffer[64]; // buffer array for data recieve over serial port
int count=0; // counter for buffer array
SoftwareSerial GPS(4, 5);
TinyGPS gps;
unsigned long fix_age;
long lat, lon;
float LAT, LON;
void gpsdump(TinyGPS &gps);
bool feedgps();
void getGPS();
void setup()
{
Sim900Serial.begin(19200); // the SIM900 baud rate
GPS.begin(9600); // GPS module baud rate
Serial.begin(9600); // the Serial port of Arduino baud rate.
delay(500);
Sim900_Inti();
}
void loop()
{
Sim900Serial.listen();
if (Sim900Serial.available()) // If date is comming from from GSM shield)
{
while(Sim900Serial.available()) // reading data into char array
{
buffer[count ]=Sim900Serial.read(); // writing data into array
if(count == 64)break;
}
Serial.write(buffer,count); // if no data transmission ends, write buffer to hardware serial port
Cmd_Read_Act(); //Read the 'COMMAND' sent to SIM900 through SMS
clearBufferArray(); // call clearBufferArray function to clear the storaged data from the array
count = 0; // set counter of while loop to zero
}
if (Serial.available()) // if data is available on hardwareserial port ==> data is comming from PC or notebook
Sim900Serial.println(Serial.read()); // write it to the GPRS shield
}
void clearBufferArray() // function to clear buffer array
{
for (int i=0; i<count;i )
{ buffer[i]=NULL;} // clear all index of array with command NULL
}
void Sim900_Inti(void)
{
Sim900Serial.println("AT CMGF=1"); // Set GSM shield to sms mode
Serial.println("AT CMGF=1");
delay(500);
Sim900Serial.println("AT CNMI=2,2");
Serial.println("AT CMGF=1");
delay(500);
}
void Cmd_Read_Act(void) //Function reads the SMS sent to SIM900 shield.
{
char buffer2[64];
for (int i=0; i<count;i )
{ buffer2[i]=char(buffer[i]);}
if (strstr(buffer2,"INSTRUCTABLES")) //Comparing password entered with password stored in program
{
Serial.println("Password Authenticated.");
Serial.println("Sending reply SMS. ");
SendTextMessage();
}
}
void SendTextMessage()
{
Sim900Serial.print("AT CMGF=1\r"); //Sending the SMS in text mode
delay(100);
Sim900Serial.println("AT CMGS = \"**********\"");//The predefined phone number
delay(100);
Sim900Serial.println("Please wait while Module calculates position");//the content of the message
delay(100);
Sim900Serial.println((char)26);//the ASCII code of the ctrl z is 26
delay(100);
Sim900Serial.println();
int counter=0;
GPS.listen();
for (;;)
{
long lat, lon;
unsigned long fix_age, time, date, speed, course;
unsigned long chars;
unsigned short sentences, failed_checksum;
long Latitude, Longitude;
// retrieves /- lat/long in 100000ths of a degree
gps.get_position(&lat, &lon, &fix_age);
getGPS();
Serial.print("Latitude : ");
Serial.print(LAT/1000000,7);
Serial.print(" :: Longitude : ");
Serial.println(LON/1000000,7);
if (LAT == 0 && LON == 0)
{
continue;
}
counter ;
if (counter<30)
{
continue;
}
Sim900Serial.print("AT CMGF=1\r"); //Sending the SMS in text mode
delay(100);
Sim900Serial.println("AT CMGS = \"**********\"");//The predefined phone number
delay(100);
Sim900Serial.print("Latitude : ");
Sim900Serial.print(LAT/1000000,7);
Sim900Serial.print(" :: Longitude : ");
Sim900Serial.println(LON/1000000,7);//the content of the message
delay(100);
Sim900Serial.println((char)26);//the ASCII code of the ctrl z is 26
delay(100);
Sim900Serial.println();
counter=0;
break;
}
}
void getGPS()
{
bool newdata = false;
unsigned long start = millis();
while (millis() - start < 1000)
{
if (feedgps ())
{
newdata = true;
}
}
if (newdata)
{
gpsdump(gps);
}
}
bool feedgps()
{
while (GPS.available())
{
if (gps.encode(GPS.read()))
return true;
}return 0;
}
void gpsdump(TinyGPS &gps)
{
gps.get_position(&lat, &lon);
LAT = lat;
LON = lon;
{
feedgps();
}
}
These are the steps to install the library :-
- Download the Tiny GPS library for the Arduino. (link)
- Extract the zip file to the folder: " Libraries/Documents/Arduino/libraries "
- Now you would see the library under " Sketch --> Import Library " in the Arduino IDE.
- You can proceed with the Arduino Uno programming.
The following is the source code for the Arduino. Copy the code below and load it on the Arduino :-
//Program written for Global Car Tracking System by Jayvis Gonsalves
#include <SoftwareSerial.h>
#include <string.h>
#include <TinyGPS.h>
SoftwareSerial Sim900Serial(2, 3);
byte buffer[64]; // buffer array for data recieve over serial port
int count=0; // counter for buffer array
SoftwareSerial GPS(4, 5);
TinyGPS gps;
unsigned long fix_age;
long lat, lon;
float LAT, LON;
void gpsdump(TinyGPS &gps);
bool feedgps();
void getGPS();
void setup()
{
Sim900Serial.begin(19200); // the SIM900 baud rate
GPS.begin(9600); // GPS module baud rate
Serial.begin(9600); // the Serial port of Arduino baud rate.
delay(500);
Sim900_Inti();
}
void loop()
{
Sim900Serial.listen();
if (Sim900Serial.available()) // If date is comming from from GSM shield)
{
while(Sim900Serial.available()) // reading data into char array
{
buffer[count ]=Sim900Serial.read(); // writing data into array
if(count == 64)break;
}
Serial.write(buffer,count); // if no data transmission ends, write buffer to hardware serial port
Cmd_Read_Act(); //Read the 'COMMAND' sent to SIM900 through SMS
clearBufferArray(); // call clearBufferArray function to clear the storaged data from the array
count = 0; // set counter of while loop to zero
}
if (Serial.available()) // if data is available on hardwareserial port ==> data is comming from PC or notebook
Sim900Serial.println(Serial.read()); // write it to the GPRS shield
}
void clearBufferArray() // function to clear buffer array
{
for (int i=0; i<count;i )
{ buffer[i]=NULL;} // clear all index of array with command NULL
}
void Sim900_Inti(void)
{
Sim900Serial.println("AT CMGF=1"); // Set GSM shield to sms mode
Serial.println("AT CMGF=1");
delay(500);
Sim900Serial.println("AT CNMI=2,2");
Serial.println("AT CMGF=1");
delay(500);
}
void Cmd_Read_Act(void) //Function reads the SMS sent to SIM900 shield.
{
char buffer2[64];
for (int i=0; i<count;i )
{ buffer2[i]=char(buffer[i]);}
if (strstr(buffer2,"INSTRUCTABLES")) //Comparing password entered with password stored in program
{
Serial.println("Password Authenticated.");
Serial.println("Sending reply SMS. ");
SendTextMessage();
}
}
void SendTextMessage()
{
Sim900Serial.print("AT CMGF=1\r"); //Sending the SMS in text mode
delay(100);
Sim900Serial.println("AT CMGS = \"**********\"");//The predefined phone number
delay(100);
Sim900Serial.println("Please wait while Module calculates position");//the content of the message
delay(100);
Sim900Serial.println((char)26);//the ASCII code of the ctrl z is 26
delay(100);
Sim900Serial.println();
int counter=0;
GPS.listen();
for (;;)
{
long lat, lon;
unsigned long fix_age, time, date, speed, course;
unsigned long chars;
unsigned short sentences, failed_checksum;
long Latitude, Longitude;
// retrieves /- lat/long in 100000ths of a degree
gps.get_position(&lat, &lon, &fix_age);
getGPS();
Serial.print("Latitude : ");
Serial.print(LAT/1000000,7);
Serial.print(" :: Longitude : ");
Serial.println(LON/1000000,7);
if (LAT == 0 && LON == 0)
{
continue;
}
counter ;
if (counter<30)
{
continue;
}
Sim900Serial.print("AT CMGF=1\r"); //Sending the SMS in text mode
delay(100);
Sim900Serial.println("AT CMGS = \"**********\"");//The predefined phone number
delay(100);
Sim900Serial.print("Latitude : ");
Sim900Serial.print(LAT/1000000,7);
Sim900Serial.print(" :: Longitude : ");
Sim900Serial.println(LON/1000000,7);//the content of the message
delay(100);
Sim900Serial.println((char)26);//the ASCII code of the ctrl z is 26
delay(100);
Sim900Serial.println();
counter=0;
break;
}
}
void getGPS()
{
bool newdata = false;
unsigned long start = millis();
while (millis() - start < 1000)
{
if (feedgps ())
{
newdata = true;
}
}
if (newdata)
{
gpsdump(gps);
}
}
bool feedgps()
{
while (GPS.available())
{
if (gps.encode(GPS.read()))
return true;
}return 0;
}
void gpsdump(TinyGPS &gps)
{
gps.get_position(&lat, &lon);
LAT = lat;
LON = lon;
{
feedgps();
}
}
Step 7: Testing


Now that you have built the 'Athena', it is time to install it in your vehicle. The device can be installed anywhere in the car: the hood, cabin or trunk. Remember that the device must be hidden from view and difficult to locate by a car thief. The device must directly be connected to the 12v Car battery as it must run even when the car is switched off.
Steps to track down your vehicle using 'Athena' :-
And there you go...congratulations!!! You have built your very own Global Car Tracking System.
If you have any difficulties building this instructable, do feel free to ask.
GREAT!!!!! NOW GO AHEAD AND CONSTRUCT ONE YOURSELF!!!!! : )
Steps to track down your vehicle using 'Athena' :-
- When your car is stolen and you wish to track your car, simply send a text message containing the password to your car.
- Athena then verifies the password you entered with the password stored in its program. If the password matches, then Athena sends an acknowledgment SMS to the predefined phone/cell number stored in it.
- Athena then begins to calculate its GPS position and once a GPS lock is acheived, it sends the coordinates of its location to the number stored in its program.
- After you receive the Coordinates in your message, copy them to the search bar in google maps to reveal the position of your stolen car.
And there you go...congratulations!!! You have built your very own Global Car Tracking System.
If you have any difficulties building this instructable, do feel free to ask.
GREAT!!!!! NOW GO AHEAD AND CONSTRUCT ONE YOURSELF!!!!! : )
