

Introduction: Arduino Base Auto Direction Robot





it is the robot that move by avoiding obstacles. it sens the object and view surround and keep going where free space is available.
Step 1: Component Need










- 4 dc motors
- 1 motor driver
- cables
- few jumper cable
- ultrasonic sensor
- arduino(here i use pro mini 5V)
- servo
- pcb
- motor clamp
- wood piece
- some tape
- battery(12V)
- ultrasonic sensor stand
- some skrue
Step 2: Make Frame



attach motor clamp to wood piece with skrues.
Step 3: Motor Connection





connect motor in clamp and connect wire to motor.and check connection proper or not. and deside the front part of robot and connect servo motor
Step 4: Ultrasonic Sensor & Motor Driver
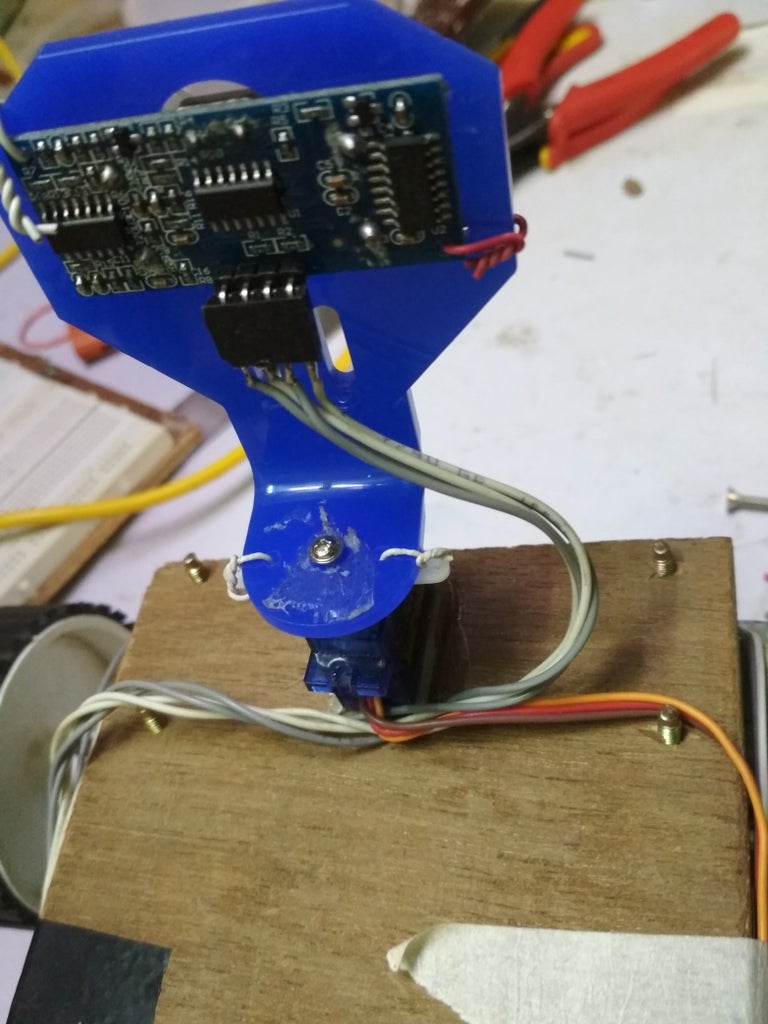
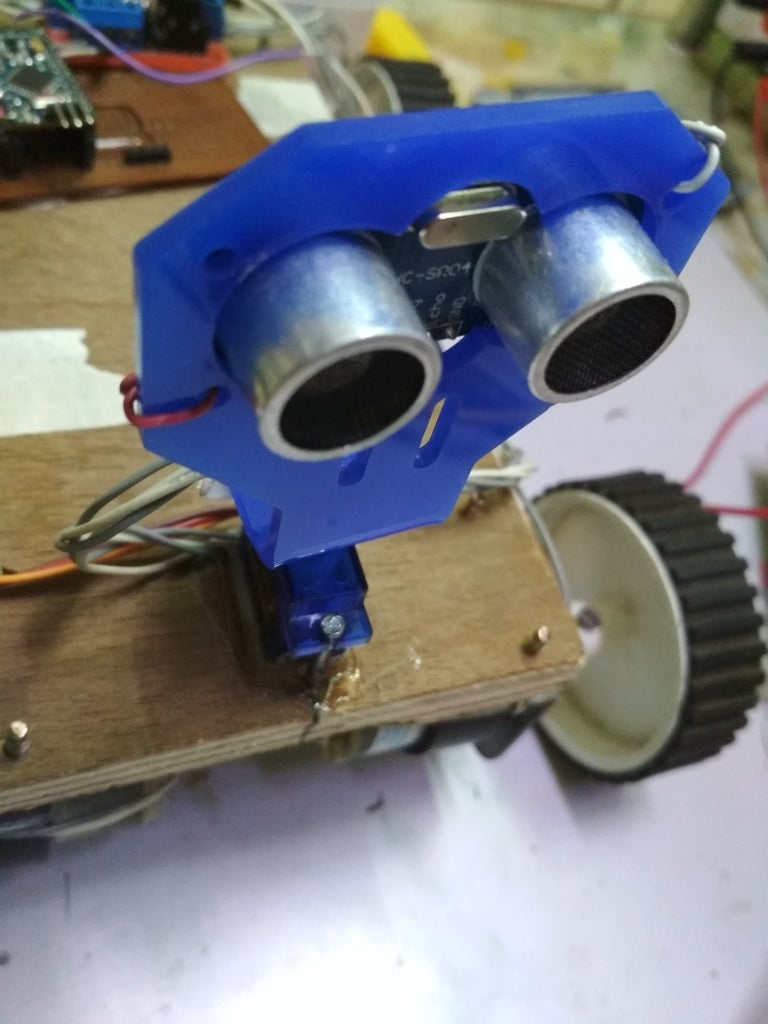

connect ultrasonic sensor to stand and mount on motor. make wire that to connect with arduino. also connect the wire to motor driver.
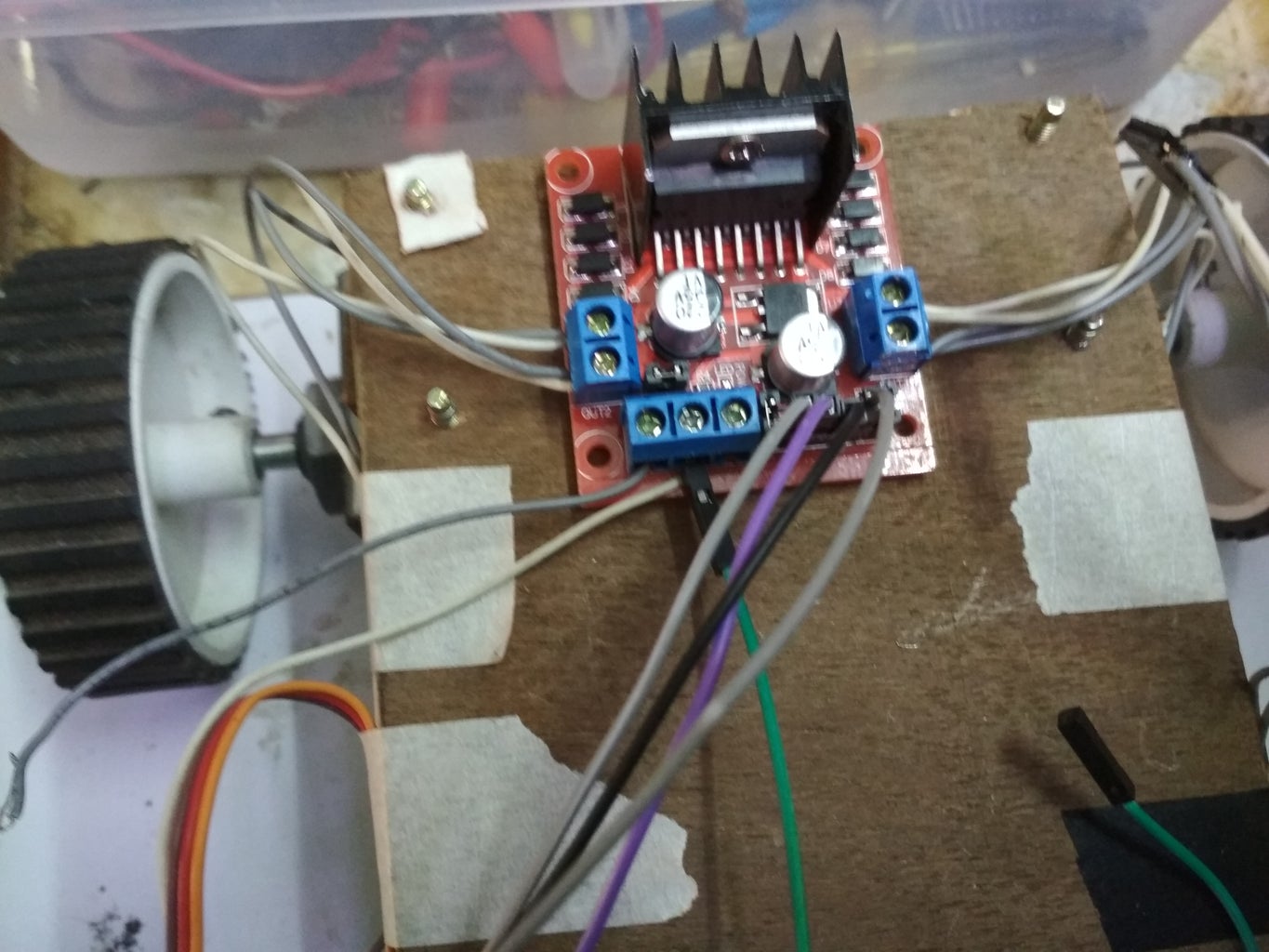
Step 5: Main Processing Bord






make the circuit as picture diagram. use male and female header for connect components like servo, ultrasonic sensor, motor driver etc.
Step 6: Final Connection


arrange the component on frame and wire all the component to circuit. connect battery or any other 12V dc supply to motor driver and connect 5V supply to arduino board.
Step 7: Program Arduino
program the arduino by this program. i use FTDI programer to programe arduino pro mini.

