Introduction: Automatic Arduino Pet Feeder - 3D Printed (With Stepper Motor)





Hi guys,
I made an automatic 3D Printed Pet Feeder (or just dispenser, but I use it to feed my dog). I 3D modelled all that project. U can print it by yourself. All parts are down there.
Basically how it works, is u type in two Feeding Times, for example 8:30 and 17:30, then when time is right stepper motor enables and feeds your little pet.
Electric Components:
- Stepper Motor NEMA17 - 42HB34F08AB
- Stepper Motor Driver A4988
- Arduino UNO
- Arduino Keypad 4x4
- RTC DS3231 Clock
- LCD Display 16x2
- Step Down Module (I used LM2596S DC/DC) 12V to 5V
- 12V Power Supply
- a lot of wires
Step 1: Printing All Parts

Printing all the parts took me about 5 days. To assemble everything together I used 3mm bolts (m3) and 3mm nuts.
Attachments














Step 2: Electronics
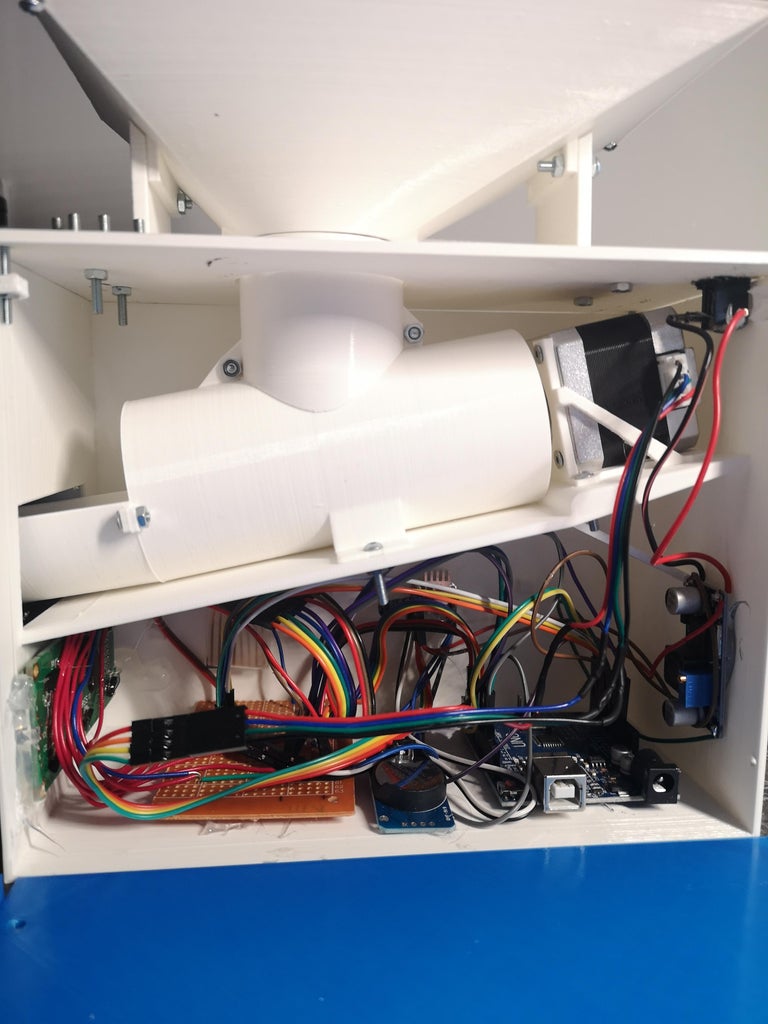

Wire everything like in the circuit. If your LCD screen is too dark or too bright try different values of resistors or play with the voltage regulator.
Step 3: Arduino Code
Arduino Code includes additional libraries: DS3231 RTC, Arduino Keypad 4x4
When you press 'A' - Program asks for first feed time and waits untill you type in HH:MM:SS
When you press 'B' - Program asks for second feed time and waits untill you type in HH:MM:SS
When you press 'C' - Stepper Motor runs for one cycle (one feed)
When you press 'D' - LCD displays current Date
LCD displays normally current Time and hour and minutes of first and second feed time.
All functions are described in code:
#include <DS3231.h>
#include <LiquidCrystal.h>
#include <Keypad.h>
const byte ROWS = 4;
const byte COLS = 4;
const int stepPin = 10;
const int dirPin = A3;
char keys[ROWS][COLS] = {
{'1','2','3','A'},
{'4','5','6','B'},
{'7','8','9','C'},
{'*','0','#','D'}
};
byte rowPins[ROWS] = { 2, 3, 4, 5 };
byte colPins[COLS] = { 6, 7, 8, 9 };
Keypad keypad = Keypad( makeKeymap(keys), rowPins, colPins, ROWS, COLS );
DS3231 rtc(A4, A5);
LiquidCrystal lcd(A0, A1, A2, 11, 12, 13); // (rs, enable, d4, d5, d6, d7)
int feed_time = 2000; //define how fast stepper motor works
int feed_length = 600; //define how much steps should your motor do (mine does 200 for full spin)
String feed1;
String feed2;
char key[8];
int j = 0;
char button;
void setup() {
rtc.begin();
lcd.begin(16,2);
Serial.begin(9600);
pinMode(A0, OUTPUT);
pinMode(A1, OUTPUT);
pinMode(A2, OUTPUT);
pinMode(stepPin,OUTPUT);
pinMode(dirPin,OUTPUT);
}
void loop() {
lcd.setCursor(0,0);
lcd.print("Time: ");
lcd.print(rtc.getTimeStr());
lcd.setCursor(0,1);
//lcd.print("Date: "); //Date to display
//lcd.print(rtc.getDateStr());
lcd.print("1)");
lcd.print(feed1);
lcd.setCursor(7,1);
lcd.print(" 2)");
lcd.print(feed2);
lcd.setCursor(15,1);
lcd.print(" ");
button = keypad.getKey();
if(button == 'A'){
lcd.clear();
lcd.setCursor(0,0);
lcd.print("HH:MM:SS 1st");
delay(500);
j = 0;
lcd.setCursor(j,1);
key[0] = keypad.waitForKey();
lcd.print(key[0]);j++;
lcd.setCursor(j,1);
key[1] = keypad.waitForKey();
lcd.print(key[1]);j++;
lcd.setCursor(j,1);
key[2] = ':';
lcd.print(key[2]);j++;
lcd.setCursor(j,1);
key[3] = keypad.waitForKey();
lcd.print(key[3]);j++;
lcd.setCursor(j,1);
key[4] = keypad.waitForKey();
lcd.print(key[4]);j++;
lcd.setCursor(j,1);
key[5] = ':';
lcd.print(key[5]);j++;
lcd.setCursor(j,1);
key[6] = keypad.waitForKey();
lcd.print(key[6]);j++;
lcd.setCursor(j,1);
key[7] = keypad.waitForKey();
lcd.print(key[7]);
key[8] = '\0';
feed1 = String(key);
delay(1000);
lcd.clear();
}
if(button == 'B'){
lcd.clear();
lcd.setCursor(0,0);
lcd.print("HH:MM:SS 2nd");
delay(500);
j = 0;
lcd.setCursor(j,1);
key[0] = keypad.waitForKey();
lcd.print(key[0]);j++;
lcd.setCursor(j,1);
key[1] = keypad.waitForKey();
lcd.print(key[1]);j++;
lcd.setCursor(j,1);
key[2] = ':';
lcd.print(key[2]);j++;
lcd.setCursor(j,1);
key[3] = keypad.waitForKey();
lcd.print(key[3]);j++;
lcd.setCursor(j,1);
key[4] = keypad.waitForKey();
lcd.print(key[4]);j++;
lcd.setCursor(j,1);
key[5] = ':';
lcd.print(key[5]);j++;
lcd.setCursor(j,1);
key[6] = keypad.waitForKey();
lcd.print(key[6]);j++;
lcd.setCursor(j,1);
key[7] = keypad.waitForKey();
lcd.print(key[7]);
key[8] = '\0';
feed2 = String(key);
delay(1000);
lcd.clear();
}
if(button == 'D'){
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Time: ");
lcd.print(rtc.getTimeStr());
lcd.setCursor(0,1);
lcd.print("Date: "); //Date to display
lcd.print(rtc.getDateStr());
delay(5000);
lcd.clear();
}
if(button == 'C'){
digitalWrite(dirPin,HIGH); // Enables the motor to move in a particular direction
for(int x = 0; x < feed_length; x++) { // Makes 200 pulses for making one full cycle rotation
digitalWrite(stepPin,HIGH);
delayMicroseconds(feed_time);
digitalWrite(stepPin,LOW);
delayMicroseconds(feed_time);
}
delay(1000);
}
if (feed1==rtc.getTimeStr())
{
digitalWrite(dirPin,HIGH); // Enables the motor to move in a particular direction
for(int x = 0; x < feed_length; x++) { // Makes 200 pulses for making one full cycle rotation
digitalWrite(stepPin,HIGH);
delayMicroseconds(feed_time);
digitalWrite(stepPin,LOW);
delayMicroseconds(feed_time);
}
delay(1000);
}
if (feed2==rtc.getTimeStr())
{
digitalWrite(dirPin,HIGH); // Enables the motor to move in a particular direction
for(int x = 0; x < feed_length; x++) { // Makes 200 pulses for making one full cycle rotation
digitalWrite(stepPin,HIGH);
delayMicroseconds(feed_time);
digitalWrite(stepPin,LOW);
delayMicroseconds(feed_time);
}
delay(1000);
}
} 
Step 4: Set the Time and Date for DS3231 RTC Module

Here is code for setting the Time and Date in your DS3231 (it includes library like in the previous step) - DS3231 library
The DS3231 SDA ---> A4 in Arduino
The DS3231 SCL ---> A5 in Arduino
When u write that code into arduino, u have to open the serial monitor (115200) and just check if your time and date match.
#include <DS3231.h>
// Init the DS3231 using the hardware interface
DS3231 rtc(A4, A5);
void setup()
{
// Setup Serial connection
Serial.begin(115200);
// Initialize the rtc object
rtc.begin();
// Write your current time and date to this following lines
rtc.setDOW(MONDAY); // Set Day-of-Week to Monday
rtc.setTime(12, 0, 0); // Set the time to 12:00:00 (24hr format)
rtc.setDate(01, 01, 2014); // Set the date to January 1st, 2014
}
void loop()
{
// Send Day-of-Week
Serial.print(rtc.getDOWStr());
Serial.print(" ");
// Send date
Serial.print(rtc.getDateStr());
Serial.print(" -- ");
// Send time
Serial.println(rtc.getTimeStr());
// Wait one second before repeating :)
delay (1000);
}<br>Attachments
Step 5: Screw Mechanism
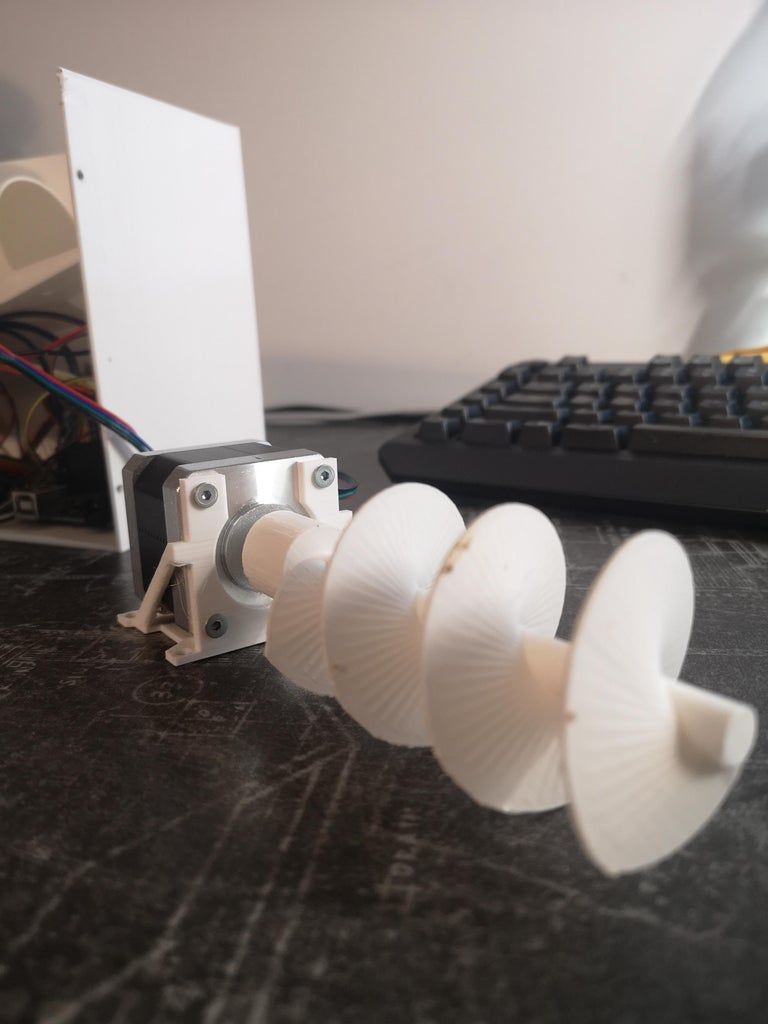



U just put a nut in hole and screw it with all your force. It keeps screw and motor shaft together and tight.
3D printing that screw was a little harder than I thought. I'm using Ender 3 and I couldn't print it standing (vertically). Model was just collapsing. The only way, that was working for me, was printing it horizontally with support blocks like on photos.