

Introduction: Bluetooth Controlled Car Using Arduino

Hello guys! Its my first project using arduino uno . I hope you like this project and don’t forget to follow me . So lets get on to this project-
Step 1: Arduino Robot Car Control Using Hc-05 Bluetooth Module
Materials required-
1- BO Motor(4 motors required) with wheels
2- arduino uno r3
3- l298n motor driver
4-hc-05 bt module
5- base(chasis)
6-jumper wires (male to female,etc).
7-smart phone
Step 2: Connecting the Component

The steps to make the car are as follows-
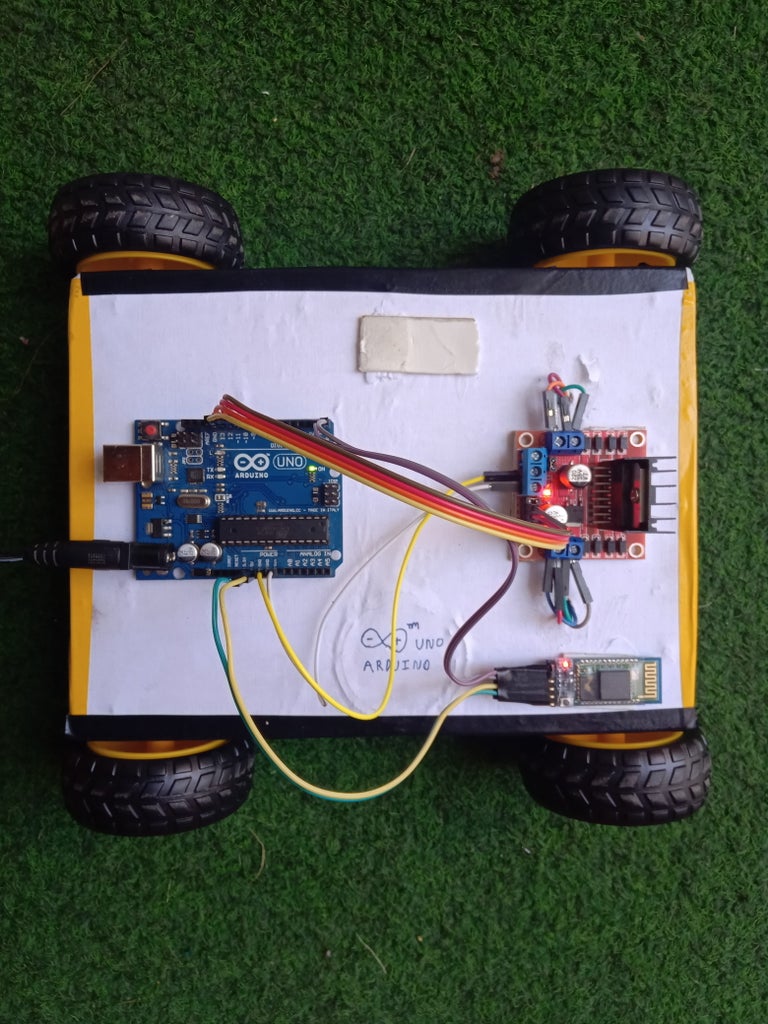
STEP1- take the chasis and past the ardunio ; l298n ; hc-05 and bo motor on the chasis. STEP2- connect all the bo motor to l298n
STEP3- connect l298n to arduino. As showen-
IN1 TO- pin 13D
IN2 TO- pin 12D
IN3 TO- pin 11D
IN4 TO- pin 10D
Connect power pin 5v to vin in arduino
STEP4- connect HC-05 to arduino as showen Vcc to –5v pin in arduino Gnd to – gnd pin in arduino Tx to-rx in arduino Rx to –tx pin in arduino
Step 3: Uploading the Code
upload the following code -
char t;
void setup() { pinMode(13,OUTPUT); //left motors forward pinMode(12,OUTPUT); //left motors reverse pinMode(11,OUTPUT); //right motors forward pinMode(10,OUTPUT); //right motors reverse pinMode(9,OUTPUT); //Led Serial.begin(9600);
}
void loop() { if(Serial.available()){ t = Serial.read(); Serial.println(t); }
if(t == 'F'){ //move forward(all motors rotate in forward direction) digitalWrite(13,HIGH); digitalWrite(11,HIGH); }
else if(t == 'G'){ //move reverse (all motors rotate in reverse direction) digitalWrite(12,HIGH); digitalWrite(10,HIGH); }
else if(t == 'L'){ //turn right (left side motors rotate in forward direction, right side motors doesn't rotate) digitalWrite(11,HIGH); }
else if(t == 'R'){ //turn left (right side motors rotate in forward direction, left side motors doesn't rotate) digitalWrite(13,HIGH); }
else if(t == 'W'){ //turn led on or off) digitalWrite(9,HIGH); } else if(t == 'w'){ digitalWrite(9,LOW); }
else if(t == 'S'){ //STOP (all motors stop) digitalWrite(13,LOW); digitalWrite(12,LOW); digitalWrite(11,LOW); digitalWrite(10,LOW); } delay(100); }
