

Introduction: Lily∞Bot With Arduino Uno: Obstacle Avoidance Using 4 Infrared Distance Sensors


More by the author:




About: I am a professor of electrical engineering and robotics, Open Source Hardware Trailblazer, and co-founder of Black In Engineering and Black in Robotics. @drcaberry and @noiresteminist on most socials . It will…
This project is an extension of the Lily∞Bot motion control project. It will show how to add infrared sensors, write code to test infrared sensors and use infrared sensors for potential field or proportional control obstacle avoidance on the robot.
I am an open-source hardware trailblazer and this is part of my guidebook to show academics how to engage in open source hardware for education, service, and research by using open-source robots.
- Professional website: https://wordpress.rose-hulman.edu/berry123/open-source-hardware-trailblazer/
- Business website: https://noiresteminist.com/
- YouTube playlist on channel: https://youtube.com/playlist?list=PL175eO9NwPXJm3xZPF113ve4L6tO8ckNi
- Instructables: https://www.instructables.com/member/carlottaberry/settings/?cb=1658526069
- Hackster.io: https://www.hackster.io/berry123
Supplies
- 4 Sharp IR Sensors (GP2Y0A02YK or GP2Y0A21YK0F)
- 4 IR cables
- 8-8 mm Phillips head panhead stainless steel machine screws
- 4 IR sensor mounts 3d printed from GITHUB files here
- one LED
- obe 220Ω resistor
- mini Phillips head screwdriver
Step 1: Build the Lily∞Bot Base Robot
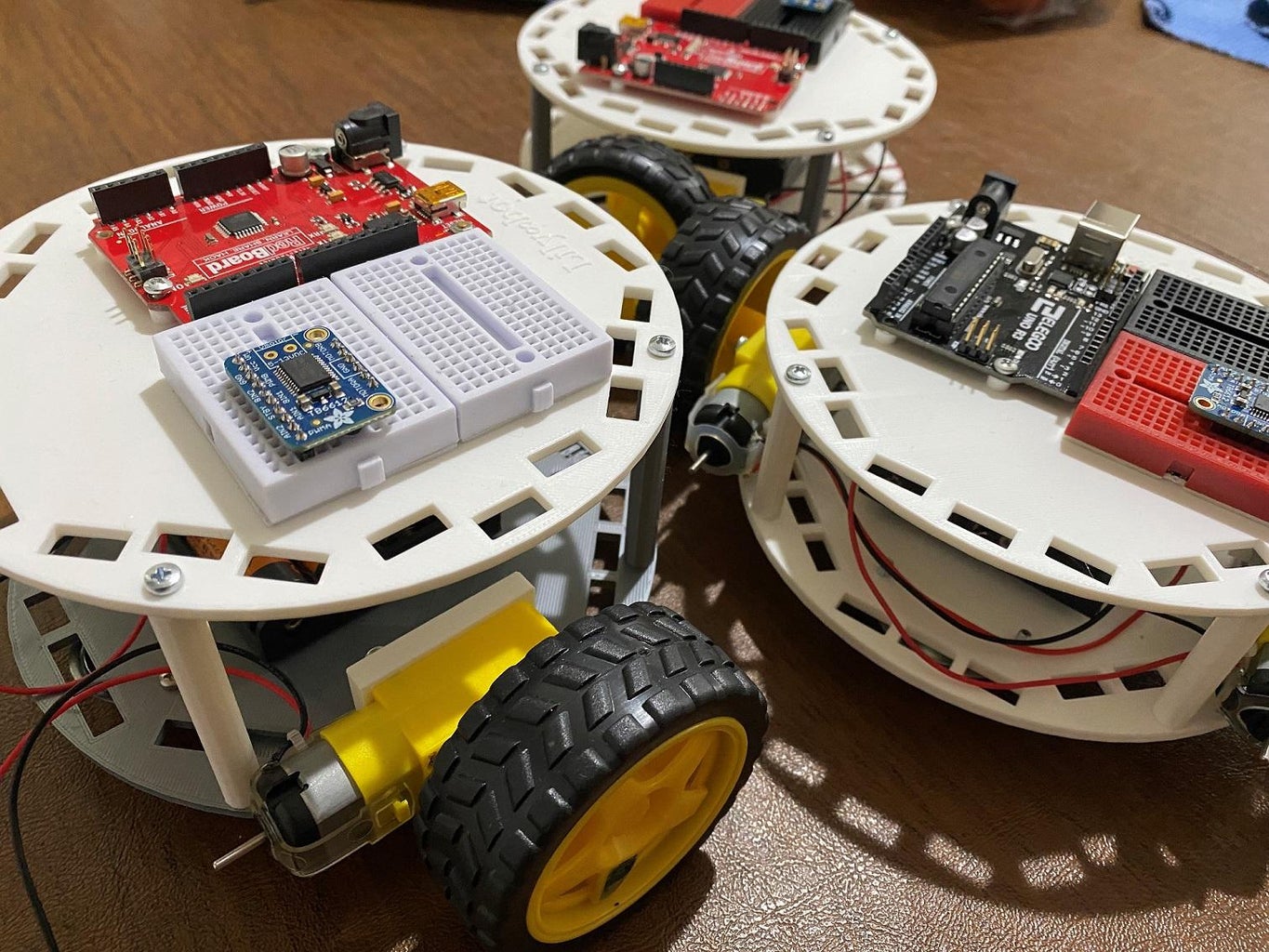
Build the base Lily∞Bot with the motor driver and LEDS by following the directions at this link.
Step 2: Attach the 4 Sharp Infrared Sensors to Lily∞Bot



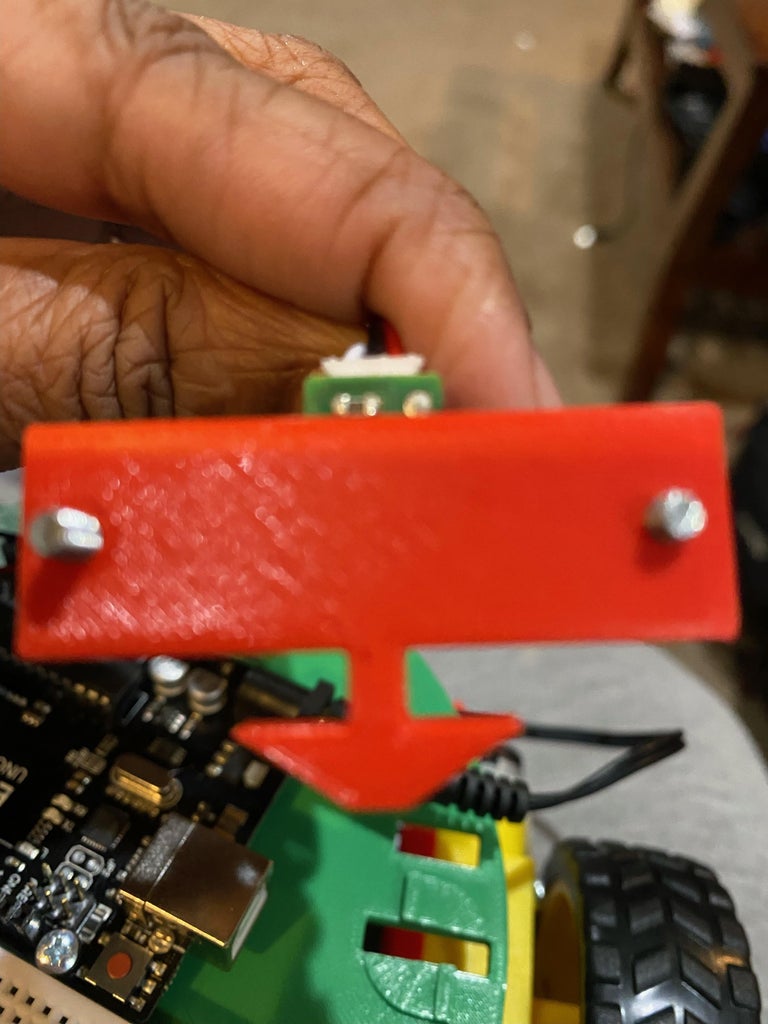

- Use the 8-8 mm screws to attach the 4 Sharp Infrared sensors to the IR mounts.
- Screw the mounts into the top chassis of the Lily∞Bot in the front, back, left and right.
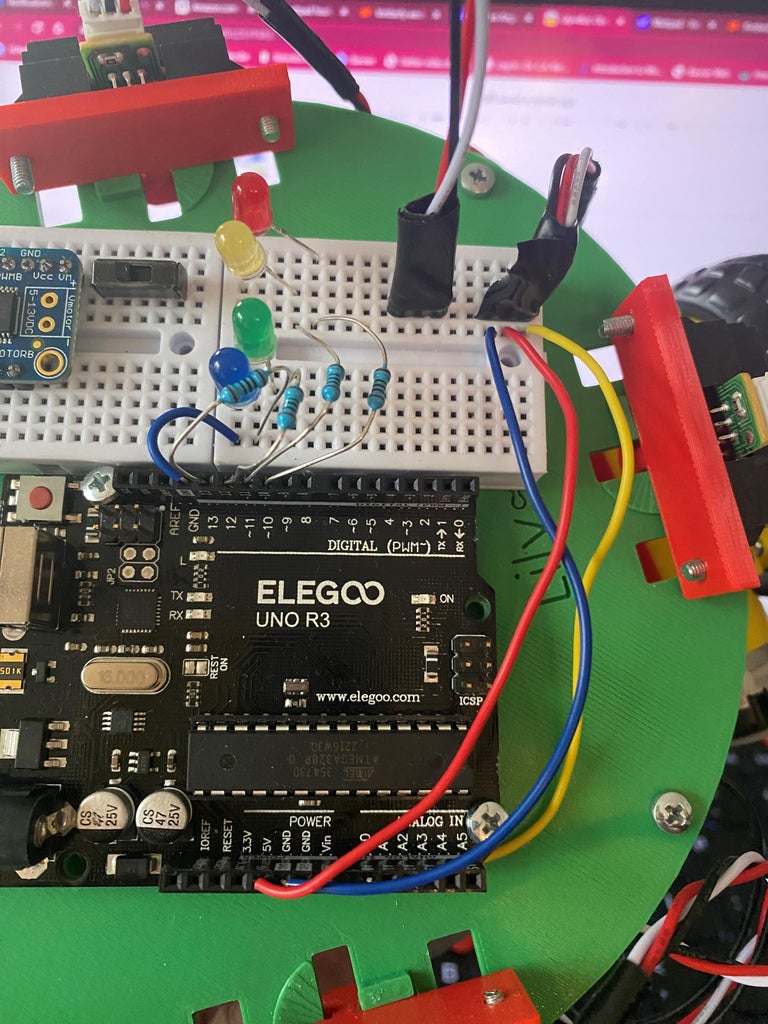
- Attach the red wire to 5V on breadboard from Arduino Uno.
- Attach the black wire to ground on breadboard from Arduino Uno
- Attach the white wire which is the analog signal to A0, A1, A2, and A3.
Step 3: Write the Code to Test the Sensors
- If you have never programmed in Arduino sketch, please review the link to learn how to program using the cloud editor or IDE.
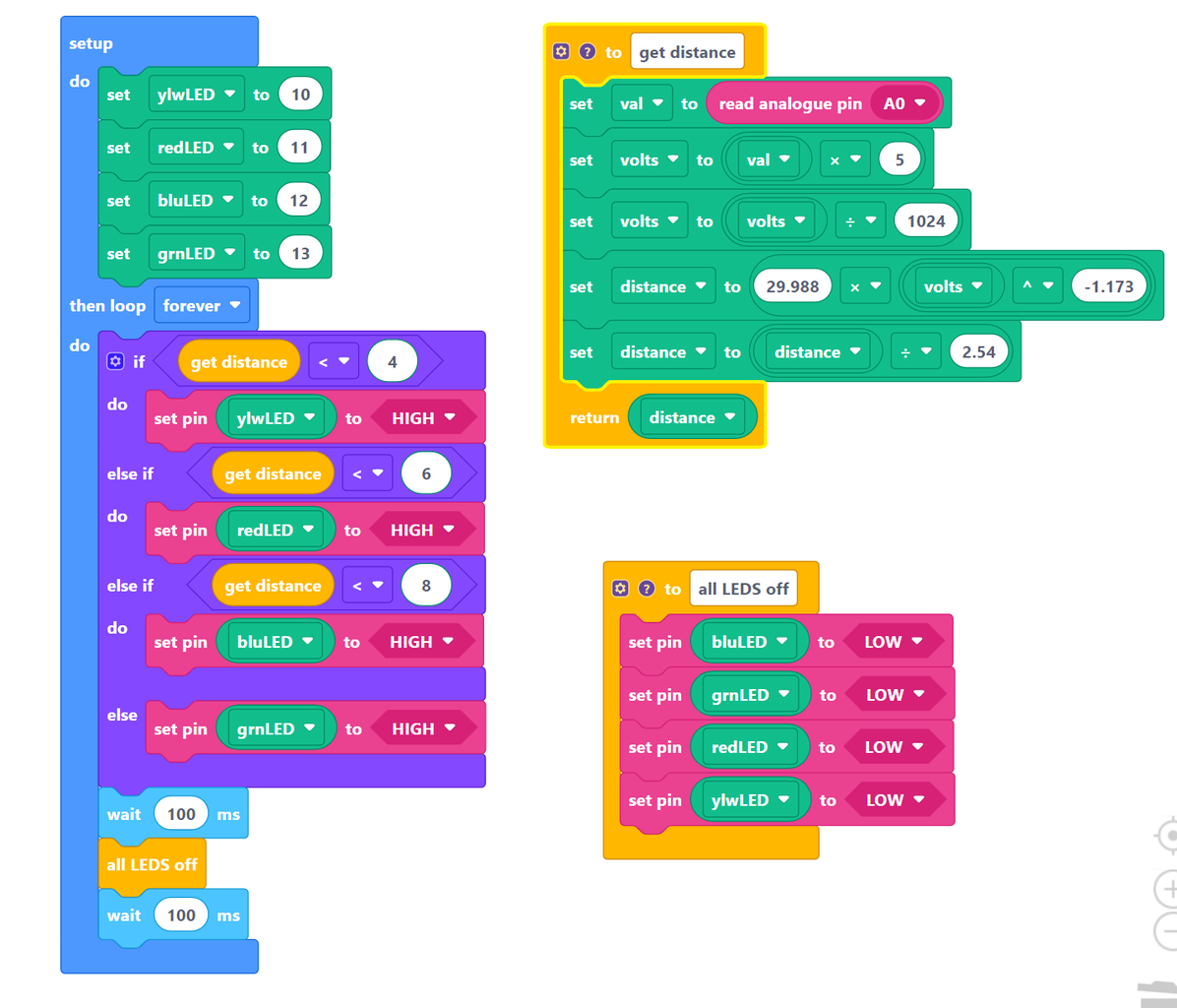
- Use code kit at the following link to use graphical programming to test that each sensor is working.
- The code generated by the graphical program to run in the Arduino IDE is shown below.
- View the video for more details on how the programs works for the short range and long range sensors.
- Note that the sample code only tests the sensor at A0.
The following code was generated for the short range IR sensor.
int ylwLED, redLED, bluLED, grnLED;
float val, distance, volts;
// read sonar and return distance
int get_distance2() {
val = (analogRead(A0));
volts = val * 5;
volts = volts / 1024;
distance = 29.988 * Math.pow(volts, -1.173);
distance = distance / 2.54;
return distance;
}
// turn of all LEDs
void all_LEDS_off2() {
digitalWrite(bluLED, LOW);
digitalWrite(grnLED, LOW);
digitalWrite(redLED, LOW);
digitalWrite(ylwLED, LOW);
}
void setup() {
pinMode(ylwLED, OUTPUT);
pinMode(redLED, OUTPUT);
pinMode(bluLED, OUTPUT);
pinMode(grnLED, OUTPUT);
ylwLED = 10;
redLED = 11;
bluLED = 12;
grnLED = 13;
pinMode(A0, INPUT);
}
void loop() {
if ((get_distance2()) < 4) {
digitalWrite(ylwLED, HIGH);
} else if ((get_distance2()) < 6) {
digitalWrite(redLED, HIGH);
} else if ((get_distance2()) < 8) {
digitalWrite(bluLED, HIGH);
} else {
digitalWrite(grnLED, HIGH);
}
delay(100);
all_LEDS_off2();
delay(100);
}
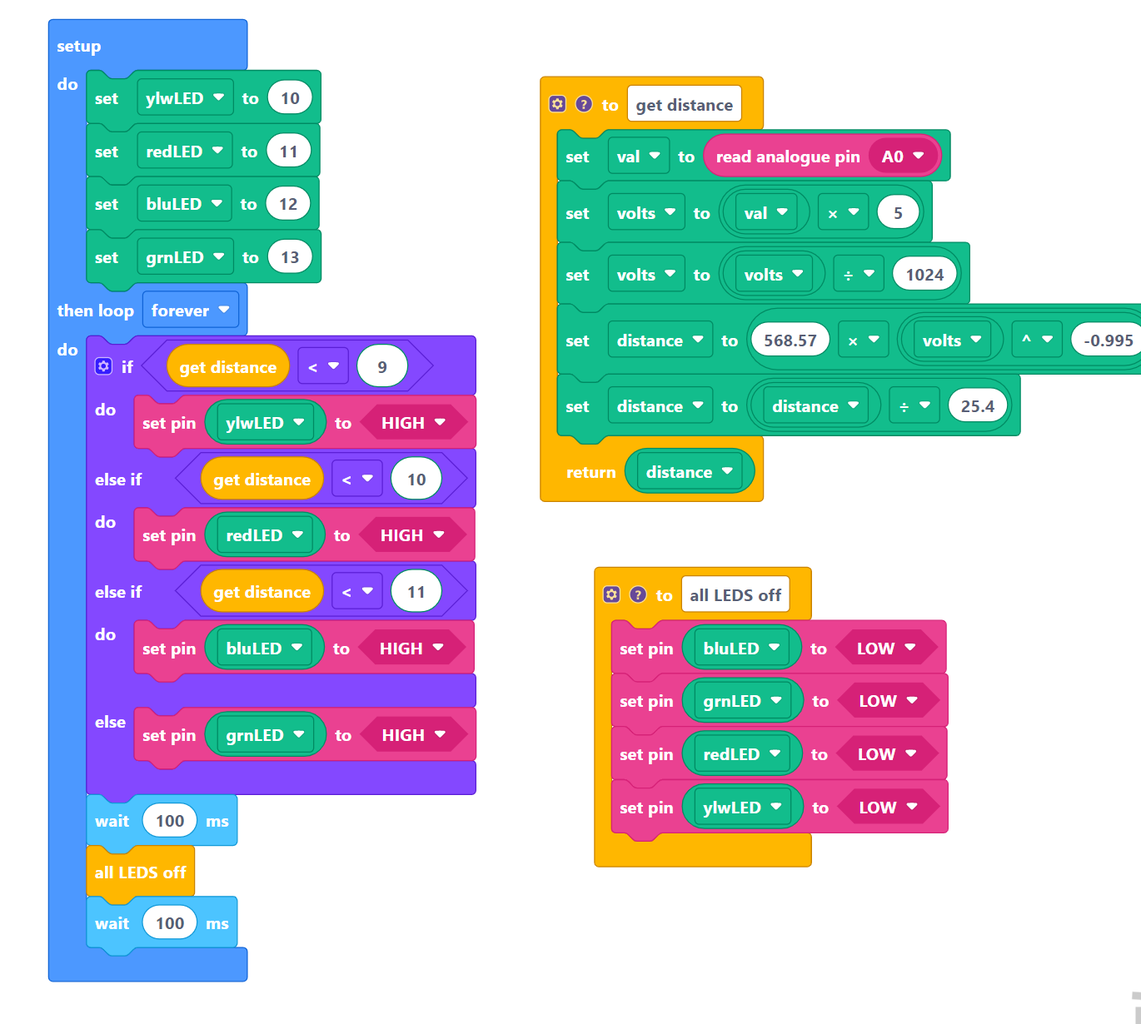
The following code was generated for the long range IR sensor.
int ylwLED, redLED, bluLED, grnLED;
float val, distance, volts;
// read sonar and return distance
int get_distance2() {
val = (analogRead(A0));
volts = val * 5;
volts = volts / 1024;
distance = 568.57 * Math.pow(volts, -0.995);
distance = distance / 25.4;
return distance;
}
// turn of all LEDs
void all_LEDS_off2() {
digitalWrite(bluLED, LOW);
digitalWrite(grnLED, LOW);
digitalWrite(redLED, LOW);
digitalWrite(ylwLED, LOW);
}
void setup() {
pinMode(ylwLED, OUTPUT);
pinMode(redLED, OUTPUT);
pinMode(bluLED, OUTPUT);
pinMode(grnLED, OUTPUT);
ylwLED = 10;
redLED = 11;
bluLED = 12;
grnLED = 13;
pinMode(A0, INPUT);
}
void loop() {
if ((get_distance2()) < 9) {
digitalWrite(ylwLED, HIGH);
} else if ((get_distance2()) < 10) {
digitalWrite(redLED, HIGH);
} else if ((get_distance2()) < 11) {
digitalWrite(bluLED, HIGH);
} else {
digitalWrite(grnLED, HIGH);
}
delay(100);
all_LEDS_off2();
delay(100);
}

