

Introduction: Line Following Robot Using Smartphone's Camera





The first mission was with the help of IR sensors. Now, its back with another mission to get back what rightfully belonged to it, only this time with a Smartphone and its camera having its back and Dabble, a smart mobile application to help them coordinate with its amazing abilities. You can get the app from HERE.
Are you ready for making liner follower ready for mission 2.0?
Let’s begin right away!
Step 1: Components Required
Hardware
- evive
- Bluetooth Module HC05
- Base Plate
- Motor Mounts
- DC Motors
- Wheel
- Caster Wheel
- Jumper Cables
- Bolts and Nuts
Software
- Dabble
- Arduino IDE
All the Hardware components and the Dabbe app can be found in the STEMpedia Starter Package. Not just this number of other projects can be made using it.
Step 2: Making the Base Robot
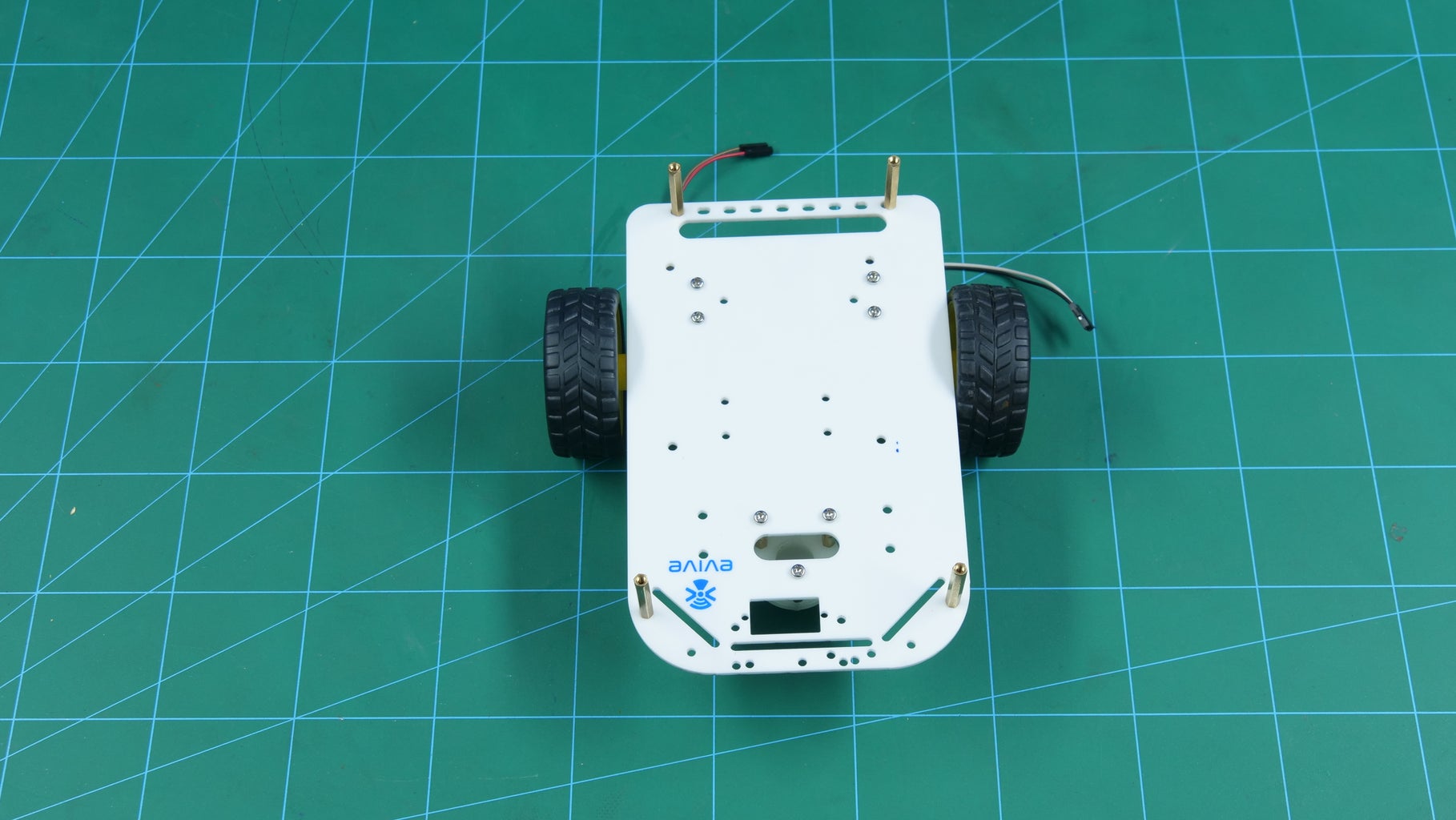
Take a base plate or chassis.

Mount two motor mounts using M3 bolts and nuts.

Onto these motor mounts, attach Dual Shaft DC Motors.

Once you mount the motors, fix the wheels onto the free shafts.

For any robot to get stable, we will be needing third support. Thus, we will be adding a caster wheel to do the job.

Flip the assembly. Thus, our base is ready.
Step 3: Adding Evive

We won't be adding evive in the base robot as that base plate will be used to place our Smartphone.
Thus, take another base plate and mount evive on it using M3 nuts and bolts.
Step 4: Completing the Assembly

Take your base robot and attach the spacers at the four corners.
Fix these spacers onto the chassis with evive on it using bolts.
Fix your Smartphone onto the blate using Double-sided tape.
Step 5: Connections
Make the connections as shown in the given figure:

Step 6: Code
Upload the following code to evive:

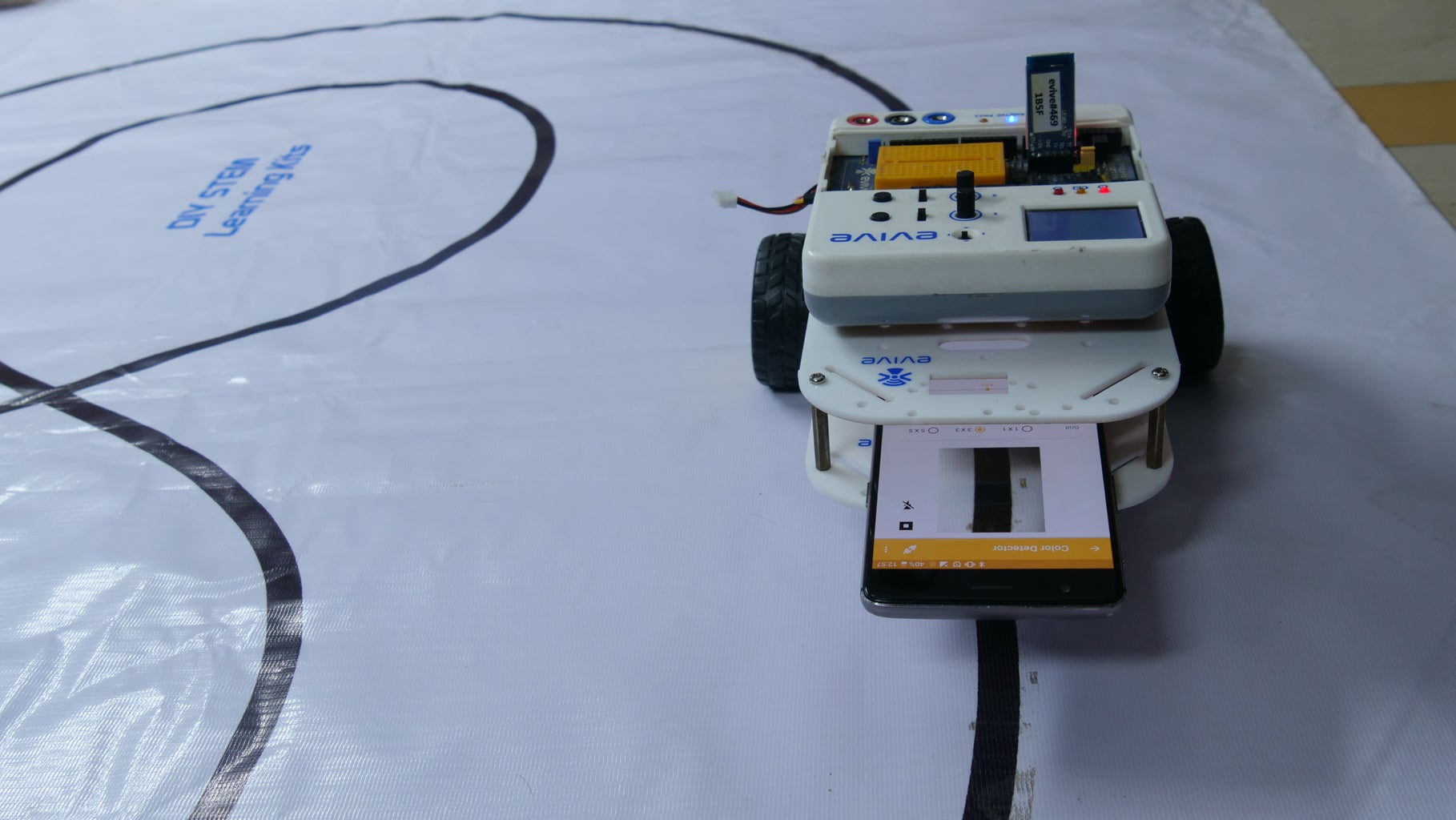
Step 7: Working
The Dabble application has a number of modules, out of which camera is one of them.
Once you select this module, there are other four options available.
Select the colour detector module. We will be making the line follower follow a black line on a white sheet.
You need to configure the module to the following settings:
- 3 x 3 scale
- Average
- Grayscale
- 1 bit.
This module has two modes,
- Camera mode (Normal)
- Binary mode
You can use these modes to place your phone in the centre.
If you choose the camera mode, you will be able to see the actual line, whereas once you select the binary mode, you will be able to see it’s binary representation on your phone’s screen.
These binary values are sent to evive. Thus, giving our line follower the instructions to follow.
Working:
- When the camera detects a line in the centre, the robot moves forward.
- When the line is detected on the right side, the robot turns right.
- If the line is detected on the left side, the robot turns left.
Step 8: Conclusion
With this, your line follower robot using a Smartphone is all set!
PS. We have something really exciting to share with you: Our campaign is now LIVE on Indiegogo and has been 112% FUNDED! DIYers and project makers all across the globe are LOVING what we do! To know more about our super cool campaign and back us, visit HERE
