

Introduction: Motorized Camera Mini Jib







The Digital Bird DIY 3D printable Mini Jib offers smooth near silent operation combined with range of exciting new camera moves not easily achieved with a slider. The Jib connects wirelessly with all the other parts of the Digital Bird camera motion control system offering you limitless possibilities for finding the perfect shot. The system is controlled using one of the two Digital Bird touch screen WIFI controllers. If you require Realtime PTZ control then build the PTZ plus controller. If you only require programmed moves then the Digital Bird compact controller will be sufficient watch the videos at the end of this Instructables for more information on the controller options.
The Jib is quite a large build with many steps to follow however with all the parts printed and the kit of non printed components at your side you you should manage to put this together in about a day with a few simple tools.
Features:
• Typically up to 550mm of Jib Travel more with lighter payloads.
• Vertical, horizontal & diagonal motion.
• Camera head can be mounted Upright or under slung.
• Digital Bird Pan Head can be used to provide a second axis for pan control of the hole jib assembly.
• Tested on payloads up to 4.5KG ( 2.5kg of Camera with PT head)
• Sony NP style batteries with 7.5v external power port.
• Full feature interface through Digital Bird compact WIFI remote or PTZ remote
• OLED battery monitor and PTZ slave ID
• Camera shutter control
• Links wirelessly with all the other Digital Bird devices.
• Ultra quiet operation, Silky smooth motion.
Operating modes:
• A-B straight run
• A-B with acceleration controls (Ramp/Ease)
• A-B-A Bounce mode
• Time-lapse mode with built in intervalometer and camera shutter control.
• Six key sequencer for more complex moves.
• Stop motion functions for animators.
• PTZplus real-time camera functions.
Credits:
This project makes particular use of two main opensource arduino libraries for which I am very grateful.
- gin66/FastAccelStepper A great resource for controlling multiple stepper motors with acceleration control on all steppers
- Seithan/EasyNextion Library An easy to use method of setting up and actioning commands from the Nextion displays.
Supplies

Tools
- Super Glue
- A pair of small pliers
- A pair of tweezers
- A set of metric Allen keys
- A kitchen torch or other heating device. A gas ring will do.
- A hot glue gun (Nice to have but not essential)
- A sharp blade & a file for cleaning up the parts as required.
- Some small metal drill bits 2-6mm
- A hack saw (may be required to remove the feet from the end of the tripod legs).
- A few small screwdrivers
Addition tools required if not building from a kit
- Soldering Iron & solder
- JST style crimping tool
Plastic
To keep it as simple as possible have used PLA for all the parts on this project. The Jib has to withstand total payloads of over to 9kg (Camera System and counter weights). To this end many of the parts require 100% fill. Allow yourself about 3kg of filament. In my case 2KG of black and one of orange. My personal preference is to use matt PLA since the finish looks far more even and less plasticky! Layer lines are also far less obvious. I currently use Tinmorry which I am very happy with but you may have your own favourite. Parts are numbered in such a way that the first part of the number is the part number and the second part is my suggested fill so part 001_25 is 25% fill. Most parts require support somewhere so be aware! On the plus you should be fine with Automatic supports.
Steel Counter weights
The counter weights I am using are the same size and dimensions I used on the vertical slider setup and are therefore interchangeable between the the two projects.
A pattern is included for you to pass on to a supplier or cut and drill yourself from from 20x60mm bar stock. Each weight is approximately 1KG 220mm long and you will typically need 3 or possibly 4 for very heavy cameras. Remember the system has only been tested with a total camera side payload of 4.5Kg (Camera & Pan Tilt head) heavier payloads will limit the length of your Jib and may require a longer Nema17 stepper motor with a modified case to accommodate it. I sourced my weights on ebay and had the supplier cut the standard bar stock down to the 120mm lengths. I then drilled out the three 6mm diameter holes myself using a pillar drill. I am sure my supplier would have been happy to drill out the holes also, had I known at the time where I wanted them.
Suitable Tripod legs to use for the Jib Arms
It was incredibly difficult to find suitable telescopic sections to use for the jib arms. After spending around £30 on raw aluminium sections which were suppose to be telescopic but simply did not work! I hit on the idea of using the legs from a cheap Velbon DF-60 tripod I owned and only cost me £18.00 used on ebay. While these tripods are nothing special, the legs proved to be a gold mine and work very well complete with section locks. Some of these tripods are no longer manufactured however there are always some available on the used market.
- Velbon DF61
- Velbon DF60
- Velbon CX640
- Velbon C600
- Velbon EF61
- Velbon 7000
- If you purchase one of these tripods and the leg profiles do not work with the parts provided. Please send me a tracing of the smallest and largest profiles with some simple dimensions and I will provide additional parts to match where required. If in doubt send me some information on the tripod you plan to use before you disassemble it!
The Velbon DF51 models may work but have a slimmer first leg section which matches the second section on the DF61 models. Probably best to look for a DF60 or above.
Non plastic parts kits
To make the build more accessible kits are available which include all the electronics and most of the hardware listed bellow. The ESP32 comes pre-programed and everything is plug and play no soldering or crimping cables. This will save you a lot of time and trouble. Alternatively you can just purchase a Digital Bird Generic main board and provide everything else yourself.
Kits and the generic main board are available here: https://digital-bird-motion-control.myshopify.com
Bill of materials
Electronics
- Digital Bird Main board with ESP32 38pin & TMC 2208v3 Stepper driver
- Digital Bird Battery terminal board & cable 160mm long
- AS5600 encoder board & Diametrically magnetized magnet & 70mm long cable
- OLED Display 0.49 Inch 64x32 res & Cable 130mm long
- Mini Rocker switch and cable 110mm long
- Aux Power jack and cable 140mm long
- Shutter cable 2.5mm Stereo Jack socket & Cable 80mm long
- 2No mini limit switches with cable
- Stepper cable 120mm long
- 2-4 pin JST XH 2.54mm Pitch connectors (Only required If not building from a kit)
- 4 core Silicon Wire 24 Gauge (Only required If not building from a kit)
- NP style battery 7.4v 5000mAh is ideal (Not included in kit)
Drive components
- 200mm Closed loop GT2 Timing belt 6mm wide
- 20T Metal GT2 Timing pully for 6mm belt 5mm bore
- 38-40mm long High Torque Nema17 (Not included in kit)
Bearings
- 5x16x5mm x6
- 20x27x4mm x5
- 30x42x7 x2
- 55x72x9mm x1
Magnets
- 8x3mm Disc magnets x4
- 6x2mm Disc magnets x2
- Diametrically magnetized encoder magnet x1 (normally comes with the encoder board)
Camera Screws & Clamps
- 5/8th to 3/8th Camera screw adapter (Also known as a microphone adapter) x1
- 1/4 to 3/8th Camera screw adapter x2
- 1/4 Camera screw with Flip up 19mm Diameter head 11mm long screw x1
- M5 Adjustable Wing bolt 17mm long
- 32mm diameter Ross plate with 12mm diameter centre hole x2
- 25x25mm Cold shoe mounting plate with screws x1
- 120mm Swiss plate (Not included in kit)
- 120mm Swiss Clamp (Not included in kit)
Damper grease
- Teibosyn 320 Blue Very heavy or equal (Only required If not building from a kit)
Nuts & Bolts
M10 Hex head Bolt
- 120mm with M10 Nut x1
M6 Hex head bolts
- 100mm with M6 Nut x1
- 65mm x1
- 14mm x1
M6 Counter Sunk head bolt
- 60mm with M6 Nut x1
Threaded brass inserts
- M6 Threaded brass insert 8mm long x1
- M5 Threaded brass insert 8mm long x1
M5 Low profile Bolts
- 50mm x14
- 45mm x1
- 40mm x7
- 30mm x8
- 20mm x10
- 10mm x2
- M5 Nylock Nuts x 7
M5 Cap head Bolts
- 30mm x2
- 60mm x3
M5 Hex head Bolts
- 30mm x2
Grub screws
- M4 Grub screw 12mm x2
M3 Cap head bolts
- 40mm long x1
- 6mm long x4
Washers
- M5 x2
Self tapping screws
- M1.7 11mm x6
Attachments
 001_25.stl
001_25.stl- 002_25.stl
- 003_25.stl
- 005_30.stl
- 006_30.stl
- 007_60.stl
- 008_60.stl
- 009_25.stl
- 010_100.stl
- 011_100.stl
- 012_60.stl
- 013_100.stl
- 014_100.stl
- 015_100.stl
- 016_100.stl
- 017_100.stl
- 018_100.stl
- 019_100.stl
- 020_100.stl
- 021_90.stl
- 022_100.stl
- 023_60.stl
- 024_60.stl
- 025_60.stl
- 026_60.stl
- 027_60.stl
- 028_60.stl
- 029_60.stl
- 030_100.stl
- 031_35.stl
- 032_60.stl
- 033_60.stl
- 034_100.stl
- 035_100.stl
- 036_100.stl
- 037_100.stl
- 038_100.stl
- 039_60.stl
- 040_25.stl
- 041_40.stl
- 042_40.stl
- 043_40.stl
- 044_100.stl
- 045_100.stl
- 046_100.stl
- 047_100.stl














































Step 1: Assembling the Battery Bay




- Find The battery bay part 002_25 and the 4 small tabs from part 014_100. With the aid of a pair of tweezers push the 4 small tabs into the 4 slots on the inside walls of the battery bay as shown in the images.
- Take your Digital Bird NP battery harness and press it into the back of the battery bay and arrange the cables in the slot behind. You can use a little hot glue to ensure the harness and cable are held in place.
- Find part 001_25 the control box side of the drive and superglue your battery bay into the large rectangular opening as shown. (Tip. You may find it easier to screw in your mainboard before gluing in the battery bay)
Step 2: Adding the Main Board and Case Fittings







If you are not working from a kit you should first install the Jib software onto your ESP32 see step19 regarding this together with other additional steps you will need to follow regarding the electronics for the project. If you have a kit all this proprietary work has been completed for you and you can proceed as follows.
- Take your digital Bird main board and install it into the control box in the orientation shown in the pictures. Use two of the small M1.7 self tapper screws provided.
- Install the small OLED display into the side of the box and use the small strap from part 014_100 to secure it in place. (Note: The OLED display has changed position to the top of the casing for better visibility, the pictures show it on the switch side.) Plug the display into the Blue 4pin marked OLED.
- Press in your power switch and plug its black connector into the black socket on the board
- Plug your red battery plug cable into the red socket
- press your Aux power supply socket through the bottom hole and secure in place with some superglue
- Add your Camera shutter release socket to the second round hole and plug its blue 2pin connector into the blue socket on the board.
Step 3: Preparing the Gear Housing













- Find the gear housing part 004_25 and drop in the two mini limit switches as shown. Fixing them in place with 4 M1.7 self tapping screws. You can use a little Hot glue to help keep the cable in its slot. Then turn the part over and press a 5x16x5mm bearing into the hole provided.
- Take part 005_30 The stepper motor cage and bolt it down to the gear housing using three M5 low profile bolts 40mm long.
- Run in two M5 15mm long Low profile bolts into each side of the stepper cage leaving them flush with the inside for the time being.
- Find parts 012_100 and 013_100 the main gear. Run any M5 bolt up the centre to ensure they align correctly and glue them together.
- Run an M5 Low profile bolt 50mm long through the Bearing in the gear housing and add a washer to the limit switch side of the bolt then push on the plastic GT2 Gear.
- Fix a 20T Metal Pully gear to your 38mm long Nema17 stepper 5mm shaft for 6mm wide belt.
- Drop your Nema17 into the stepper cage with the cable side facing the slot. Turn the Gear housing assembly over and place a 200mm long closed loop timing belt around the plastic gear and the Stepper motor pully gear.
- Find part 003_25 The drive side of the motor box and press home a 30x42x7mm bearing into the seat provided.
- Take your Gear housing assembly and drop it into the back of part 003_25 The drive side of the motor box while guiding the Drive gear through the bearing in the side of the box
- Use the two M5 bolts on the side of the stepper cage to move the stepper back and forward tensioning the timing belt and fixing the stepper in position.
Step 4: Installing the Damper Cartridge




- If you purchased the kit it will have come with the damper cartridge already charged with damping grease. If not then find parts 010_100 & 011_100 and smear the inside faces with the heaviest damping grease you can find. I use Tribosyn 320 Blue which is around £30/100 grams which is expensive when you only need a very small quantity to fill the cartridge. There are other manufacturers out there but they are all expensive. Tribosyn also do a sample set of all there damping greases for about £15 which will have more than enough Blue Heavy to do the job.
- Before you bring the two halves of the damper cartridge together place a 20x27x4mm bearing over part 010_100 and with the damper complete slide it into the lower hole on the drive side.
- Run an M5 cap head bolt 60mm long though the gear housing and out through the centre of the damper.
Step 5: Adding the Tube End Supports





- Find the lower Jib arm end support part No. 008_60 and on the back face drive in a 40mm long M3 cap head bolt until all the thread part of the bolt is buried in the part leaving about 25mm protruding to activate the limit switches inside the casing. Push home a 5x16x5mm bearing to the inside of the part.
- Allow the end of the M3 bolt to drop into the slot on the side of the casing and press the part home over the damper cartridge bearing. Ensure that the M3 bolt activates the Limit switches without fowling.
- Add an M5 Nylock nut onto the end of the damper cartridge axle to lock the parts together. (Do not over tighten but prevent backword and forward play on the axle.)
- Take part 007_60 The upper Jib arm support and aligning the keyways press it home onto the outside face of the gear coming through the outside of the casing and add another M5 Nut to lock it in place.
- Find end caps 009_25 and press fit them both into the holes left in the side of the bearing seats. Do not glue!
Step 6: Installing the Encoder




- Take the small special Diametrically Magnetized magnet supplied with the AS5600 encoder and using a very small drop of super glue position it on the end of the stepper motor shaft at the back of the motor. Use non metallic tools to help you do this or you will not be able to get the magnet to stay where you want it!
- Measure the distance between the top inner edge of the plastic casing and the centre of the magnet.
- Using this measurement Hot glue or screw your AS5600 board into place on the back of the Battery bay as shown ensuring that the AS5600 chip will be directly under the magnet. Plug the blue 4 pin into the main board next to the OLED.
Step 7: Closing the Drive Box






- Place the box gasket part 006_30 over the control board side of the box using the small rectangular hole as a guide to direction as this should slip over the OLED display strap.
- Take one of your steel counter weights and place it into the large rectangular slot on the back side of the box
- Find Turning knob 046_100 and run in a M6 60mm long Hex head bolt. You may want to add a little super glue to the hole in the knob to help retain the bolt.
- Run the M6 bolt through the hole in the back of the control box, through the hole in the steel counter weight and into the plastic behind ensuring that everything is aligned to do this before closing the box!
- Plug in the two cables which cross between the two halves of the housing. 1) The stepper motor cable 2) The Limit switch cable.
- Making sure non of the cables get trapped under the stepper motor bring the two halves together with the gasket in the middle and drive though 4 M5 50mm long low profile bolts to close the box.
Step 8: Testing the Drive
- Add an Np battery and power up the drive. The upper drive seat should begin to spin as it searches for home. Turn the bottom Jip end seat until the lower limit switch is activated. The upper drive should reverse direction and stop. (Note: The software only sends the head around to find home for about 2000 steps so even if the limit is not found it will eventually stop on its own. This condition will not be possible when the system is fully assembled.)
- Check the OLED display is active and that it displays the available battery capacity.
This is all you can do to test the system at this stage.
Step 9: Fulcrum Base Assembly

















- Find part number 16_100 clear out all the support material from the hole in the base.
- Take a 45mm long Low profile bolt and run it through the centre of the part. Make sure the head of this bolt is low enough in the hole that it does not stop the camera screw adapter going in next, finishing flush with the base of the part.
- Take the 3/8th to 5/8th camera thread adapter and carefully melt it down into the hole until it is flush with the base of the part. See images. Have a wet sponge ready to cool off the metal at the end.
- Still on the base take a small 8x3mm Magnet and superglue it into the small slot as a keeper for the tightening tool.
- Find part 15_100 and insert an M5 brass threaded insert 8mm long into the square recess in the centre of the part. The hole in the back of this recess leads out to the 5mm hole on the outer wall of the part through which we will add a locking bolt. It is important that the brass insert is pressed in from the inside to ensure it does not work its way out over time when the locking bolt is tightened. To do this
- Give your brass insert a couple of turns onto the end of a short 30-40mm long M5 bolt.
- Heat the insert for a few seconds with a flame and press it home until it is flush with the back of the recess no further. Remove the bolt from the insert. Have a cold wet cloth handy to remove the heat when in position.
- Take the 17mm long M5 adjustable wing bolt and screw it into the side of the part from the outside face ensuring it meets your threaded insert. (Tip: you may find that when you pushed your insert into place the hole from the outside face has been partially blocked by molten plastic. If this is the case run an M5 bolt through the brass insert from the inside until it pushes through and clears the way for the intended locking bolt to pass.)
- Now press in the two bearings as shown. The top bearing is 30x42x7mm. The larger bottom bearing is a 2RS bearing 55x72x9mm
- Find the two side posts parts 18_100 & 19_100 and paying attention to their orientation screw them onto the circular base with 4No. 50mm low profile bolts.
- Find the two parts labelled together as 17_100 and drop the small toothed locking block into the small cavity between the bearings. At this stage ensure that the Adjustable wing bolt is not pressing on the back of the block.
- Take part 16_100 and insert it up between the two bearings.
- Press an M5 Nut into the hexagonal hole in the top of the circular cap provided with part 17_100.
- Place the cap onto the end of the M5 bolt running through the centre of the part and screw it down into place.
- Take a 30mm Long low profile bolt and press it into the side of part 16_100 where it will be caught by the magnet you added to the base earlier. This is used for tightening the assembly onto the tripod.
Step 10: Fulcrum Pivot Assembly















- Find your tightening knob part 023_60 run the long 100mm M6 Hex head bolt through the centre and all the way down to the bottom of the hole in the knob.
- Start by assembling part 022_90 Which is actually 5 parts glued and bolted together for ease of printing and to avoid any rough faces caused by support material. Use one M5 Low profile bolt 50mm long and use superglue between the parts. In order to ensure the parts stay aligned you can temporarily run the M6 tightening screw through the centre hole. Finally Super glue on the back plate and add two 8x3mm circular magnets as shown.(Note these magnets must attract the poles of the magnets you used on your compact WIFI controller.)
- Next take part 022_90 and using 4No. 20mm long M5 low profile bolts fix it between the two end post in the orientation shown
- Find part 021_90 which consists of three parts also glued and bolted together for the same reasons. Use two M5 low profile bolts 30mm long and again superglue between the parts to complete the part.
- Note shown on video- Take a 1/4to 3/8 camera screw adapter and using a soldering iron or Torch heat up the insert and place it into the hole in the top of the part.
- Take your metal cold shoe mount and screw it down into the insert. This will be used to mount a monitor. (The original plastic cold shoe built into the part was not strong enough.)
- Find part 20_100 and press through the two M5 Hex head bolts 30mm long to act as bearing shafts. (Note the picture shows cap head bolts but this has been updated to captive hex heads for your parts.)
- Super glue in a small circular 8x3mm magnet into the hole on the front face to act as a keeper for the locking pin.
- Bring together parts 020_100 and 021_100 with the cold shoe mount at the top and the locking magnet at the bottom, using 4 M5 low profile bolts 20mm long.
Step 11: Fulcrum Jib Support Bearings











- Find parts 024_70 and 025_70 and press a 5x16x5mm bearing and a 20x27x4mm bearing into the front and back of each.
- Run the two jib arm seats onto the axils. Ensure part 025_70 with the locking button slot is at the end with the magnet and fix in place with two M5 Nuts. (Do not over tighten but prevent play)
- Find part 030_100 the locking button and super glue in a small circular 6x2mm magnet into one end. At the other end screw in a 30mm long M5 Low profile bolt leaving the head about 10mm proud of the part to act as the locking pin.
- Slide the locking button part 30_100 into place on part 025_70 ensuring it runs smoothly and the head of the bolt goes down into the hole with the magnet. (You want this head to be a close fit in the hole to avoid to much play in the jib when locked)
- On the fulcrum base support leg press home an M6 nut to receive the tightening knob screw. Secure part 022_90 between the two posts using four 20mm long M5 low profile bolts.
- Take the complete hinge assembly and bring it together with its partner part 022_90 already attached to the base.
- Drive the tightening knob screw through the centre of the parts and into the M6 Nut on the other side.
- The Fulcrum is complete Weight for the last step Final assembly before going further with these parts
Step 12: Camera Support Assembly















- Find part 034_100 and drive in two M5 Cap head bolts 30mm long to provide the bearing axils.
- Find the two identical cylindrical Jib end seats, part 032_60 and press in a 5x16x5mm bearing and a 20x27x4mm bearing into the front and back of each.
- Pace the Jib end seats over the two axils and fix in place with two M5 nuts.
- Find part 35_100 and screw on a 31.5mm x 12mm diameter metal ross plate through the holes provided using the small screws that come with the rose. (Optionally you can use the plastic Roses part 038_100 but they do not work as well as the metal ones.) Press in an M10 nut to the other end of the part.
- Fix part 035_100 to the back of the bearing plate using 4 M5 Low profile bolts 30mm long.
- Take part 036_100 and screw on the second rose plate.
- Find part 037_100 and fix it to part 036_100 using two 40mm long M5 Cap head bolts.
- Take the tightening knob part 039_90 and run in the M10 120mm long Hex head bolt.
- Run the M10 tightening bolt through the parts to bring them together
- Take a flip up style 1/4 camera screw outside diameter 19mm 11mm long screw and place it through the hole provided in the camera plate part 037_100. You can super glue this in place to stop it falling out.
- Add a 3/8 to 1/4 adapter on the end of the camera screw for adaptability.
- Place aside ready for the Final assembly stage
Step 13: Preparing the Jib Arms









- Disassembled your tripod to provide you with two Legs
- At the wider drive end of the legs push home the two Block Tube supports part 031_60 which will prevent the thin aluminium from crushing under load.
- Drill a small hole through the top of the leg 11mm away from the end and down into the plastic tube support using a 3mm drill bit. To accurately line up the hole with hole in the end support push the arm into the support and mark the position of the hole in the metal leg through the hole in the plastic arm support.
- At the end of the first thickest leg segment next to the first leg clamp drill another hole in the face of the leg 30mm away from the side of the leg clamp with a 6mm drill bit. (Note Make sure the leg is extended before you drill this hole or the drill will go through the other sections inside also!)
- At the Camera end. If your legs have screw type feet hack saw the feet off flush with the end of the leg. If you have rubber feet remove them. (Note if after removing the rubber feet you are left with an open ended tube you will have to add some form of inner tube support as provided at the drive end to prevent the end of the tube from crushing under load. The easiest way to do this is simply scale down the drive end supports 031_60 so they fit inside your smallest leg profile and superglue them into the leg flush with the end of the tube).
- At the camera end of the leg Drill a small hole 20mm away from the end of the leg about 3mm deep in the face of the tube with a 6mm drill bit.
Note: As stated before the parts have been designed to fit the Velbon DF series tripods. If the tripod you are using uses a different leg profile, send me a tracing of the smallest and largest profiles with some dimensions and I will endeavour to provide parts files to fit your tripod legs where required. Look for tripods with 'D' profile legs as they will generally be stronger in this application see the list provided.
Step 14: Counter Weight Carrage













- Find parts 041_60, 042_60 & 043_60
- Using a soldering Bolt or a torch heat up the M6 brass insert and press it into part 041_60
- Press in the two inner sleeves 043_60 one each into parts 041_60 and 042_60
- Bolt the parts together using 4No. M5 low profile bolts 30mm long
- Bolt your 100mm long camera swiss plate to the long side of the assembly using two 10mm long M5 low profile bolts
- Find tightening knob 045_90 and press in your M6 14mm long Hex head bolt into the top of the part. Screw the bolt onto the brass insert but do not tighten it up yet.
- Slide the completed assembly onto the lower leg of your jib with the swiss plate facing outwards and the knob facing upwards.
- Find Tightening knob 044_90 and press an M6 Nut into the end and all the way down to the bottom of the hole in the part
- Take your 120mm long Swiss clamp and run an M6 Counter Sink bolt 60mm long through the centre hole in the clamp. Add one of your counter weights over the bolt and screw on your Tightening knob 044_90. This knob is deeper in order to prevent injury from the bolt end which can accommodate two weights if required. Do not attach the weight to the arm until you are finished with the build.
Step 15: Final Assembly-Fixing the Jib Arms to the Motor Box



- Start with the lower arm which should have the counter weight carriage in place on it. Slot this into the lower arm end with the damper cartridge and run an M4 Grub screw through the small hole in the top of the part and into the hole in the top of the rod end.
- Take your upper arm and repeat the last step with this arm.
Step 16: Final Assembly-Fixing the Jib Arms to the Fulcrum







- Add the two sleeves part 026_100 to your Fulcrum Bearing seats.
- Find cap 029_60 and superglue a small 6x2mm magnet into the small hole provided near the outer edge.
- Take one of your small M3 5mm long Cap head bolts and screw it into the centre of part 029_60 leaving the head proud of the part by only 1-1.5mm (This should engage with the hole in the arm but not prevent the inner tube from sliding past.)
- Add another M3 5mm screw to the upper arm cap part 028_60 as in the last step.
- Position both jib arms in the Fulcrum seats then starting with the lower arm take the Cap part 029_60 with the magnet and place it over the arm with the magnet over the locking button and the head of the small cap head bolt engaging with the hole in the arm. Bolt the cap on using two M5 50mm long Low profile bolts.
- Repeat for the upper arm ensuring the bird is not upside down!
Step 17: Final Assembly-Fixing the Camera Support







- Find the two inner sleeves part 047_100 and press them into the bearing seats.
- Find the two bearing caps part 033_60 and screw in 2No. M3 5mm Cap head bolts leaving the heads proud 1-2mm to engage with the arms as before.
- Place the ends of your Jib arms into the seats and position your caps part 033_60 over the top ensuring that the heads of the cap head bolts align with the holes drilled into the arms earlier. secure the caps in place with 4N0. 40mm M5 low profile bolts.
Step 18: The Finished Jib
Mount your Jib on a suitably sturdy video tripod and test. Watch the end of the build video to see how it should function. If you have any issues please feel free to email me and I will endeavour to help where I can. Happy building.
email: digitalbirdfilm@gmail.com
Step 19: WIFI Controller Options
Know your Jib is complete you will also need a controller to program your moves. Here you have the option of two controllers.
- The compact controller which uses a TFT touch display and allows for programmed moves only.
- The PTZplus WIFI controller adds a further set of functions allowing you to control the system with Realtime PTZ moves.
The choice is yours. Only one controller is required to operate all the devices in the system.
Step 20: Additional Information for Those Not Building From a Kit- Software Installation
The Digital Bird Kits are good value for money taking a lot of work out of the project for you and removing much of the pain of scratching around the internet looking for the correct small parts. If however you are happy to work from scratch I do provide the Generic main board used on all the project parts and is the one component which is truly custom to the project. The following notes are for those of you working from just the generic mainboard.
Software
If you have purchased the digital bird kit then the main board will come pre installed with the most up to date software.
If however you are building everything up for yourself on the back of a generic Digital Bird main board you will need to download and install the software yourself. In any case it is likely you will want to keep your system up to date with the latest software releases.
The software for all parts of the system can be downloaded free from the Digital Bird GitHub repository here: https://github.com/digitalbird01/DigitalBird-Camera-Slider
- If you haven't done so already your first step is to download the contents of the Digital Bird code repository from GitHub this is the link.https://github.com/digitalbird01/DigitalBird-Camera-Slider.git
- Click on the green “CODE” button top right and select <Download Zip>
- Unpack the ZIP file to somewhere you will remember on your system but do not unzip the zip files contained in that top level folder. This folder contains all the Digital Bird specific software you need to install the system but be aware the project is still under development and you should check back for future updates and bug fixes.
- Read the installation guide provided in the folder and titled 'DigitalBird-Software_Installation_Guide.pdf'
Or click on this link to read it know: Digital bird Installation guide

Step 21: Additional Information- Stepper Driver Tuning
TMC2208 v3.0 stepper drivers

The digital bird system uses TMC2208 v3.0 Tepper drivers which are best purchased in sets of 4 or 5
Important note:
If you are building the board up to be used on one of the pan tilt heads these drivers should be soldered directly to the main board with no pin risers. This is because space in those devices is at a premium.
All the other devices using only one driver can be mounted on the single set of pin risers supplied with the boards.
The two capacitors provided loose with the generic main board should be installed one for each driver with the negative side facing in towards the ESP32 board. When Risers are being used on the single stepper configuration this capacitor can be bent over on its side below the driver.
Tuning the drivers Vref to the motor
Stepper drivers need to be tuned to the requirements of the motor they are driving. Otherwise they may become very hot in operation and reduce the life of the driver and the motor This is achieved using a simple Voltage meter.
- Install the drivers on the board ensuring that the small adjustment screw on the top is alongside the capacitor position. Do not plug in your stepper motors. Use a 7.5v NP style battery to power the board. Do not power the board using the USB port on the ESP32.
- Power up the board and carefully place your black meter probe to the board's earth. (I use the earth on the Auxiliary power port) And the red probe on the small screw on top of the stepper driver. On the meter you can now read off the Vref voltage the driver is set up for by default typically around 1.2v.
- Using a small flat head screwdriver Turn turning the small screw clockwise in very small steps will reduce the Vref voltage down to the voltage we require to drive our steppers. For the Nema17 steppers this should be about 0.9v The Nema11 stepper should be set for 0.6v
Step 22: Additional Information- AS5600 Encoder and OLED Wiring
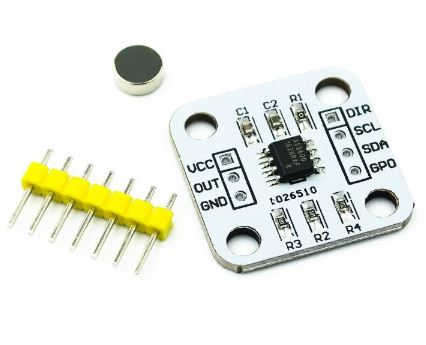
AS5600 Encoder
The AS5600 encoder board uses the ESP32 i2C function and is plugged into the blue 4pin port just below the RJ45 port on the board marked ‘Encode’ The purpose of the encoder is to read the rotation of the small, special Diametrically magnetized magnet which needs to be mounted on the motor shaft at the rear of the stepper. In software we can then calculate how many steps the motor has taken even when the motor has been powered down for example when manually moving the jib to specific key points.
The same board mounted AS5600 is used on all kits where an encoder is required bar the focus motor kit which has its own AS5600 built onto the board.
Warning!
It is very important that the small magnet used here is diametrically magnetized or the encoder will not work correctly and neither will anything else on the jib! Earlier batches of this board came to me with incorrect magnets however the suppliers seem to have fixed this issue. The way to test if your magnet is actually diametrically magnetized is to place the magnet on top of an ordinary magnet. If it lies flat it is not diametrically magnetized if it sits on its edge it is correct.
Only 4 pins are used on the AS5600 board namely:
- Gnd
- VCC
- SCL
- SDA
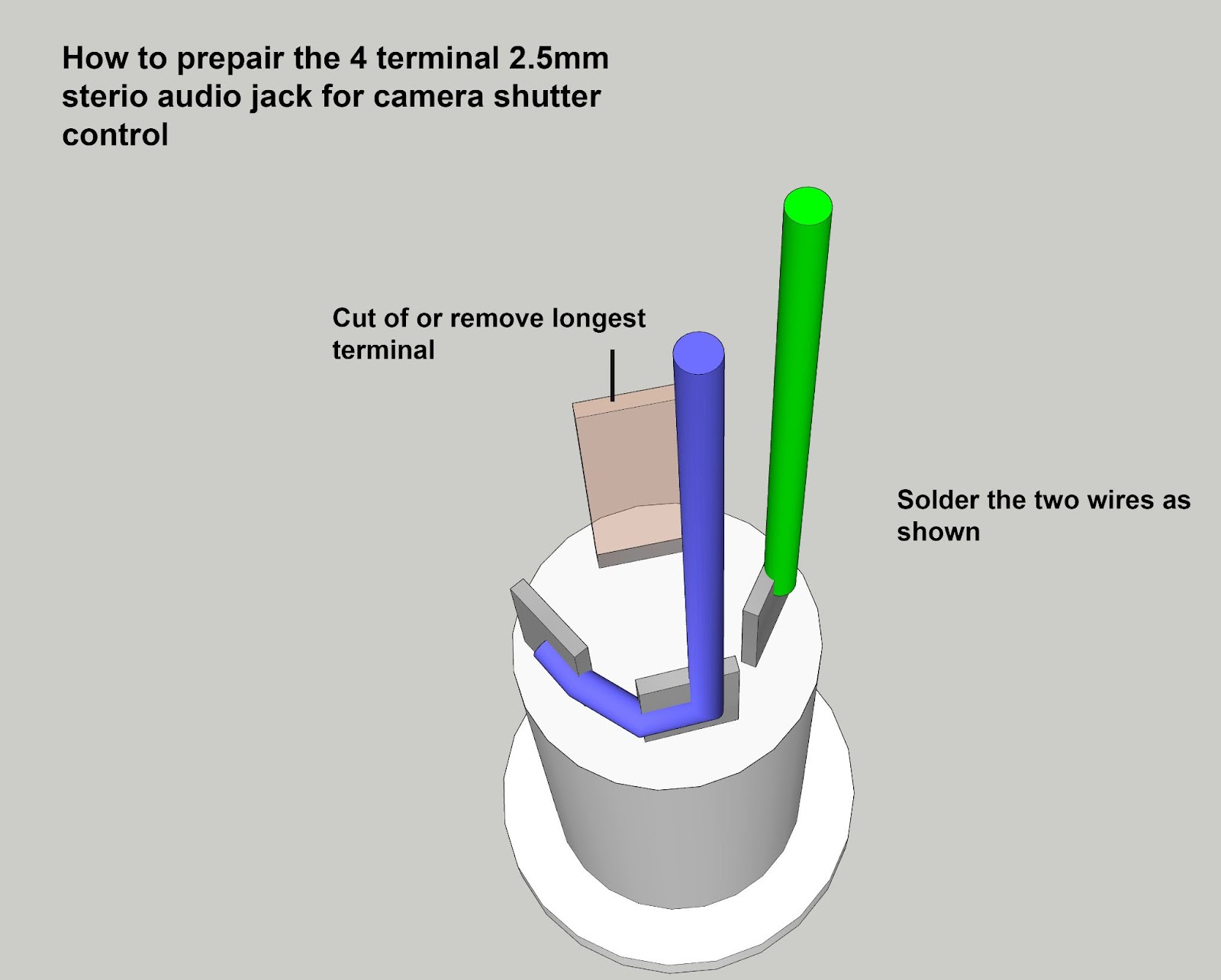
Step 23: Additional Information- Camera Shutter Jack Wiring
Wiring the 4 pin 2,5mm Shutter Socket
Nearly all camera manufacturers provide for a remote shutter control cable. While one end of the cable is Camera specific the other end is normally a 2.5mm audio jack.
Step 24: Other Digital Bird Devices You Can Use With the Jib
Some of the other devices which make up the Digital Bird complete 3D printable Camera motion control system
