

Introduction: Portable Arduino Robot Arms



Hello everyone!
Today I will teach you step by step how to build an Arduino robot arm.
Just follow my steps and you'll definitely get to make one!
Supplies
Arduino circuit board
Buttons x6
Servo motor x3 (due to weight problem, I used x2 S03T/STD and x1 micro servo SG90)
Popsicle stick x2
Gigo set (optional, just need something to make the base)
Step 1: Base!
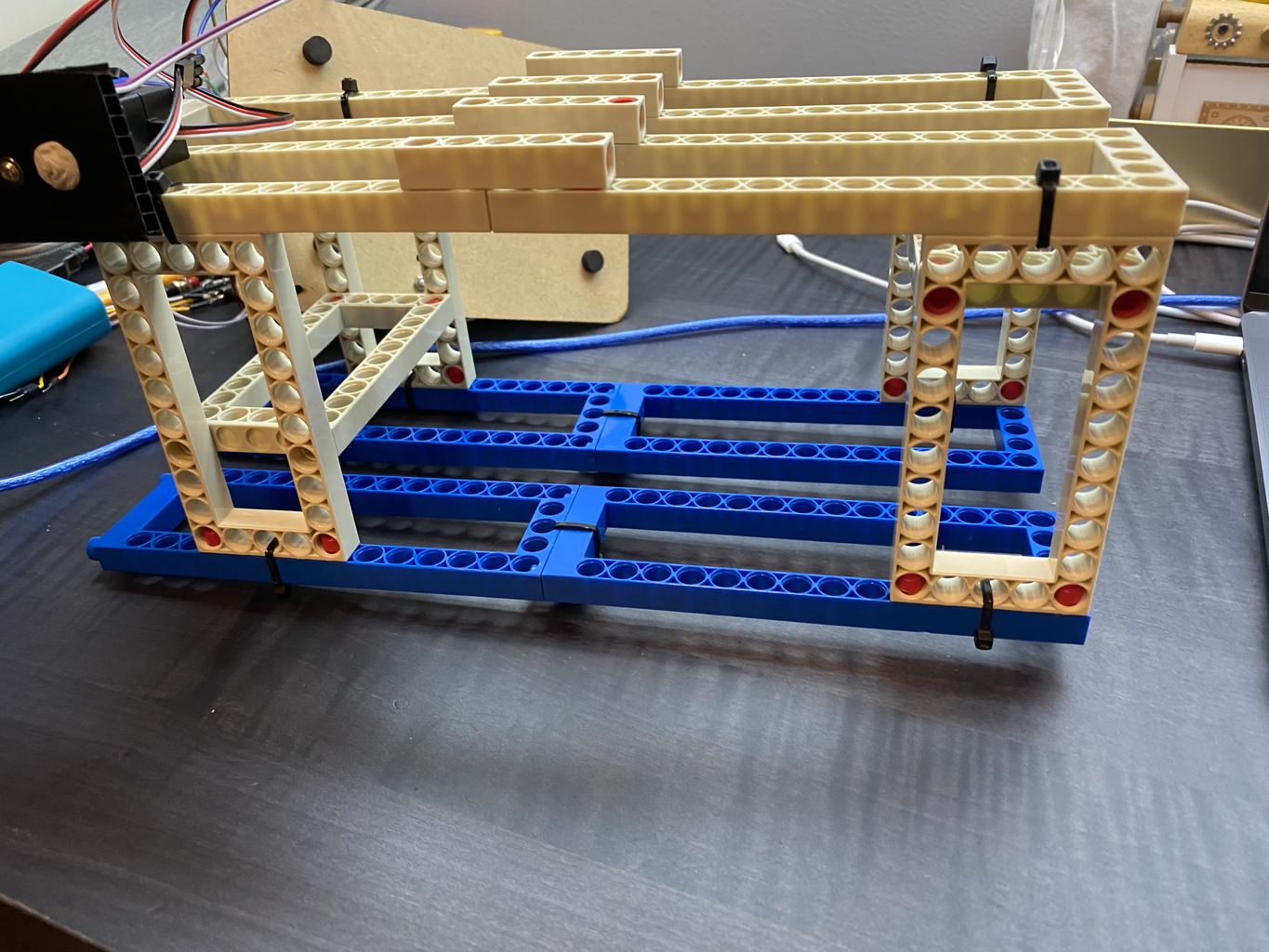

I had chosen the Gigo set as my base-building material, mainly because of its strong structure, easy building techniques, and lightweight. You could use anything to make this base, as long as you can hold it obviously, even with cardboard! The middle should be empty as your hands will be going through, basically a rectangular cylinder.
Step 2: Arms!



This is another easy step. Cut out your arm with whatever material that is strong enough and light enough, you can decide the size yourself, mine is 4cm x 30cm (arm) & 4cm x 20cm (forearm). Cut out a hole for you to put the motor, the size of S03T motor is 2cm x 4cm, and the mini servo SG90 is 1cm x 2cm. Follow the photos included for a clearer understanding. Warning: The motors do have direction problems so do be careful where your motor faced.
Step 3: Circuit!

The circuit is the hard part of this whole project. But fear not! Follow the photo included to know how you should wiring it. You don't have to neatly organize the wires like the photo, but just make sure that it won't fell out and that you can see where each wire is in case you have done something wrong and had to fix them. The battery can be any power source, a laptop is not recommended since the power required could be too strong for your laptop to handle. Once you completed the puzzle...uhh I mean wiring, check here for the codes! The coding has some explanation of what the specific line does, so don't worry about not understanding (after all you could still just copy and paste it in without looking at anything).
Step 4: Claws!

Congratulations! You made it through wiring and codes! The claws are simple as well, all you need to do is just hot glue a popsicle stick on one of the motors and another popsicle stick on the plastic board and you're done!
Step 5: Decoration!

This step is completely optional. Decorating wouldn't affect the use of this claw at all! However, If you want your arm to look a little more appealing to sight you should definitely consider decorating it! For example, I glued the buttons onto a cardboard box to cover the circuits and to make the buttons easier to press!
Step 6: Guess What
You're done! Remember, this claw is made of servo motor, so it couldn't really handle much weight, but it is still fun to pick up some plastic balls or a pencil!
