Introduction: RC Arduino Hovercraft (School Project)

Voor dit project heb ik een RC hovercraft gemaakt die communiceert tussen twee arduino nano's, en die gebaseerd is op het design van Tom Stanton. De hovercraft heeft twee bestuurbare onderdelen. De propeller die er voor zorgt dat er lucht in de plastic zak komt, en de hovercraft vooruit stuurt, en het roer dat er voor zorgt dat je kan sturen.
Supplies
Software:
Arduino IDE (Code bijgeleverd, zie beneden)
Servo library
RF24 library
Design hovercraft
RC Hovercraft 3D Modellen en template van Tom Stanton
https://tomstanton.gumroad.com/l/EOiPG
Het is mogelijk om andere designs te gebruiken, het idee blijft in principe hetzelfde
Tools:
Soldeer spullen
Schroevendraaiers
3D Printer (PLA materiaal)
Onderdelen:
2x Arduino nano
1x 3600kv Brushless motor
1x 30A RC Electronic speed controller
1x Servo
1x 5v Regulator
1x 11.1v 3s 800-1000mah Lithium Polymer battery
1x Power supply voor je controller (In dit geval AA batterijen)
1x Zender en ontvanger. Specifiek deze (NRF24L01)
2x Joysticks
1x Plastic zak, vuilniszak of vliegerzeil.
Tape
Schroeven

Step 1: Hovercraft in Elkaar Zetten


Als je al de benodigde onderdelen verzameld hebt is het tijd om de hovercraft te gaan bouwen.
In de achterkant van de body zit een gat waar de servo precies in hoort te passen.
Er zitten ook gaten waar je de bedrading doorheen kan doen, en kleine gaatjes waar schroeven in kunnen.
Schroef de servo vast door het gaatje aan de achterkant van de hovercraft.
Als de servo past, kun je beginnen met de motor op zijn plek zetten.
Dit doe je door hem vast te schroeven in de ronde casing die je geprint hebt, als je dit gedaan hebt kun je ook de propeller monteren. De propeller van de motor moet tegen de klok in draaien, anders zuigt hij geen lucht aan.
Als dit allemaal gelukt is kun je de ronde casing van de motor naadloos voor de servo schuiven en vast schroeven via het gat aan de onderkant van de body.
Als je dit gedaan hebt zit alles op zijn plek.
Step 2: Elektronica

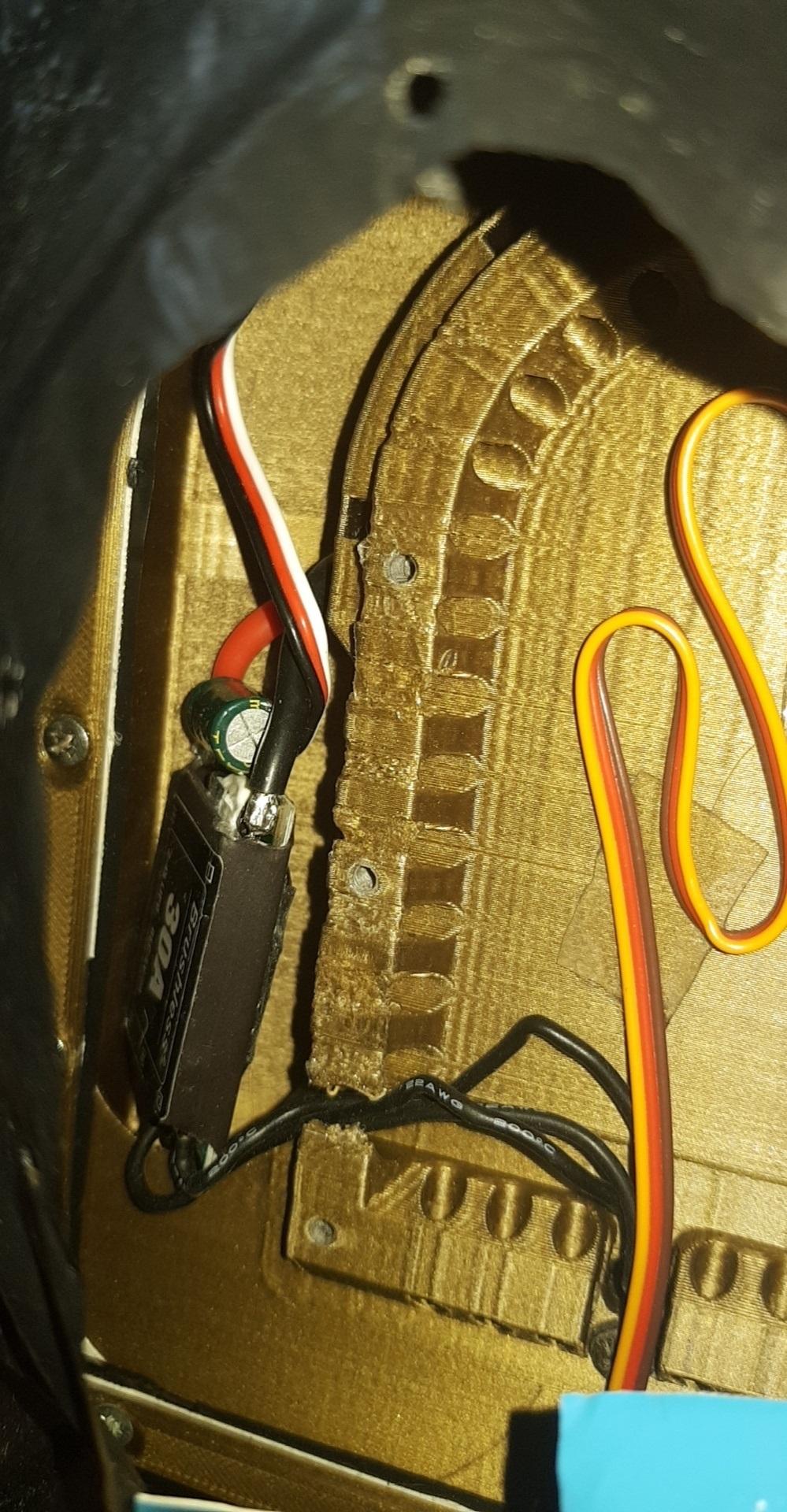

Als alle onderdelen op hun plek zitten, kun je de elektronica van de hovercraft aansluiten door middel van deze prachtige tekening, en een aantal foto's. Let op dat je de onderdelen qua gewicht goed verdeeld in de binnenkant van de hovercraft zodat hij niet naar een kant gaat leunen. Ik raad ook aan om alles meteen te solderen aangezien het lastig is om de binnenkant te bereiken nadat je het zeil hebt toegevoegd. Vergeet ook niet om de code (Receiver.INO) naar de arduino in de hovercraft te uploaden. (Zie bijgevoegde .INO bestanden)
Step 3: Toevoegen Van Het Zeil


Als dit allemaal gelukt is kun je het zeil knippen, en monteren. (Zie template bijgeleverd bij de 3D modellen) Hiervoor heb je een binnenring en een buitenring geprint. De grootste ring komt aan de binnenkant en houd het zeil op zijn plek. De kleine ring zorgt ervoor dat hij lucht dicht is.
Als het goed is zit er een opening aan de achterkant tegen het rechte stuk van de buitenring. Deze kun je afplakken met tape zodat hij lucht dicht is. (Zie blauwe tape op fotos)
Step 4: De Controller



De controller stelt in principe niet veel voor. Deze bestaat uit de arduino, de transmittor, een spanningsregelaar, een power supply en twee joysticks. Deze kan gebouwd worden via de instructies in de tekening. Vergeet ook hier niet de code van de transmittor te uploaden naar de arduino.
Als dit alles gedaan is dan kun je de hovercraft testen.
Step 5: Testen


Als de hovercraft werkt, kan het zijn dat hij afwijkt.
Als hij naar de zijkant wijkt tijdens het sturen, kan dit komen doordat hij niet gebalanceerd is. Dit is te verhelpen door een klein gewichtje toe te voegen aan de kant die te licht is.
Verder kan hij ook niet goed sturen door het ietwat onhandige design van het roer. Dit heb ik verholpen door twee stukjes karton op het roer te plakken zodat hij beter de luchtstroom beïnvloed.