

Introduction: RFID Controlled Car Trunk






Projected Achievement:
One will be able to walk up to the trunk of the car, touch their hip (which contains their wallet which contains an RFID card) to a specified point, causing the trunk to pop open. It will employ radio frequency identification to sense the human subject, a servo to pull the cord that pops the car trunk and an arduino to control the system. The system will be completely hidden from the outside.
This project will also allow me to explore a deeper understanding of electronics and C based code.
Overarching Goal:
It is important to integrate technology into our lives, enhancing day to day activities, and the standard of life. My goal in this project is turn a mindless but routine task into a natural extension of our lives.
Thank you to sparkfun.com and Electronics plus for being great part suppliers with awesome consumer service and an infinite amount of helpful information. Shout out the Open Source community...
I don't expect anything negative to occur, but this is electronics, so that being said:
I am not responsible for anything bad that may come from this instructables, by reading this, you agree to not hold me responsible for anything.
One will be able to walk up to the trunk of the car, touch their hip (which contains their wallet which contains an RFID card) to a specified point, causing the trunk to pop open. It will employ radio frequency identification to sense the human subject, a servo to pull the cord that pops the car trunk and an arduino to control the system. The system will be completely hidden from the outside.
This project will also allow me to explore a deeper understanding of electronics and C based code.
Overarching Goal:
It is important to integrate technology into our lives, enhancing day to day activities, and the standard of life. My goal in this project is turn a mindless but routine task into a natural extension of our lives.
Thank you to sparkfun.com and Electronics plus for being great part suppliers with awesome consumer service and an infinite amount of helpful information. Shout out the Open Source community...
I don't expect anything negative to occur, but this is electronics, so that being said:
I am not responsible for anything bad that may come from this instructables, by reading this, you agree to not hold me responsible for anything.
Step 1: What Is RFID

RFID stands for Radio Frequency Identification. It is a system that employ's low power radio waves to transmit data. The system requires a reader and a tag. The tag stores the data which gets read by the reader. All tags will transmit data but how they are activated or actually transmit the data varies depending on the tag.
Three main types of tags:
- Passive
Cheap, small tags that require no internal battery. The reader outputs a radio frequency which "activates" the tag's circuit. The energy from the radio wave is also enough to activate the tag and then send back the data through the returning radio wave. This relies heavily on the connection between an electric field and a magnetic field. The radio wave induces a magnetic field in the circuit and thereby induces electric current, powering the system. The tag includes a small amount of circuitry and an antenna. The larger the antenna, the greater the range as a result of greater energy "absorption".
- Semi-passive
Relies on the reader to supply the power required to send the signal (radio wave full of data) back to the reader. They have a small battery to power the circuit but rely on the energy from the radio wave to broadcast the signal back to the reader (similar to how the passive tag broadcasts it signal)
- Active
Active tags are completely battery powered. They still respond to a reader but the circuit and the return signal are battery powered. This greatly increases the range as well as the cost.
Extra Sources (and sources used):
http://www.abrfid.com/Passive-RFID-Tags-vs-Active-RFID-Tags
http://electronics.howstuffworks.com/gadgets/high-tech-gadgets/rfid2.htm
http://electronics.howstuffworks.com/gadgets/high-tech-gadgets/rfid3.htm
Picture: http://cbnbaggage.files.wordpress.com/2012/02/rfidlogo1.jpg
Step 2: Arduino Basics


Sparkfun.com has a great description of what is an arduino:
"Arduino is an open-source electronics prototyping platform based on flexible, easy-to-use hardware and software. It's intended for artists, designers, hobbyists, and anyone interested in creating interactive objects or environments. Or more simply, you load on some code and it can read sensors, perform actions based on inputs from buttons, control motors, and accept shields to further expand it's capabilities. Really, you can do almost anything."
"All Arduino boards have one thing in common: they are programmed through the Arduino IDE. This is the software that allows you to write and upload code. Beyond that, there can be a lot of differences. The number of inputs and outputs (how many sensors, LEDs, and buttons you can use on a single board), speed, operating voltage, and form factor are just a few of the variables."
Arduino used in this project:
Arduino Uno:
Great for prototyping, includes a direct USB hub for easy connection to a computer, female headers for easy breadboard and direct wire connection
Arduino Pro Mini:
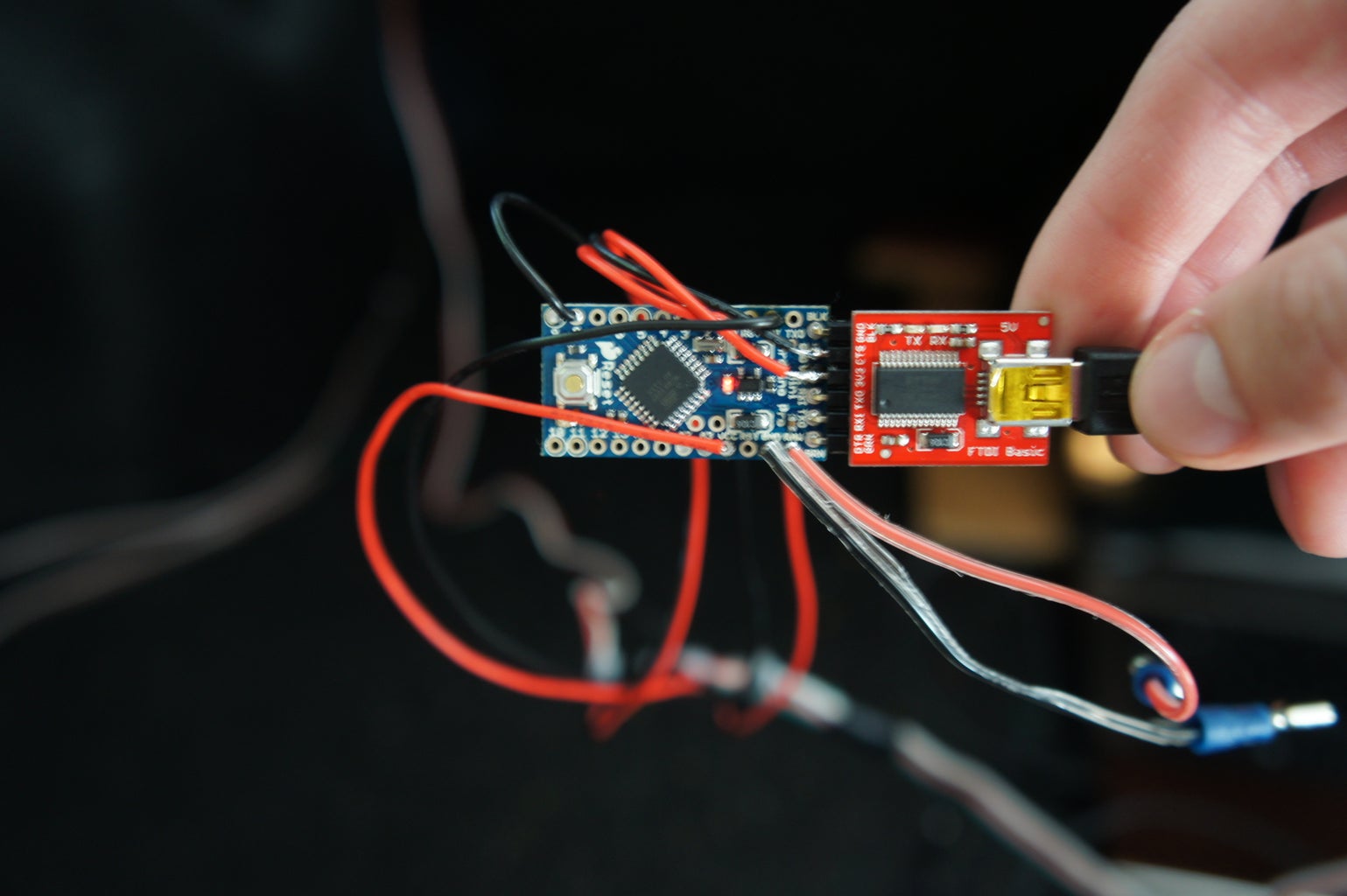
Great for use in final project, through hole soldiering for solid connections, perfectly capable but small and light, does require an adapter of sorts (FTDI basic) to upload code though
Uno Picture: http://blogdoteiodotcom.files.wordpress.com/2012/04/arduino-uno-r3.jpg
"Arduino is an open-source electronics prototyping platform based on flexible, easy-to-use hardware and software. It's intended for artists, designers, hobbyists, and anyone interested in creating interactive objects or environments. Or more simply, you load on some code and it can read sensors, perform actions based on inputs from buttons, control motors, and accept shields to further expand it's capabilities. Really, you can do almost anything."
"All Arduino boards have one thing in common: they are programmed through the Arduino IDE. This is the software that allows you to write and upload code. Beyond that, there can be a lot of differences. The number of inputs and outputs (how many sensors, LEDs, and buttons you can use on a single board), speed, operating voltage, and form factor are just a few of the variables."
Arduino used in this project:
Arduino Uno:
Great for prototyping, includes a direct USB hub for easy connection to a computer, female headers for easy breadboard and direct wire connection
Arduino Pro Mini:
Great for use in final project, through hole soldiering for solid connections, perfectly capable but small and light, does require an adapter of sorts (FTDI basic) to upload code though
Uno Picture: http://blogdoteiodotcom.files.wordpress.com/2012/04/arduino-uno-r3.jpg
Step 3: Preparation

Overview of RFID Controlled Trunk:
This system uses a passive RFID system to activate a servo when the card-like tag is sensed. The reader is embedded in a empty cavity in the car where it is easily within range of a human. It is meant to be easy and helpful.
Parts list:
ID-20 Reader: http://www.sparkfun.com/products/8628
- See step 1
USB Reader (interface hardware for ID-20 to computer or arduino/microprocessor): http://www.sparkfun.com/products/9963
- Breakout (device) used to interface the ID-20 to the computer or arduino/microprocessor
Passive RFID tags (non-reprogramable ): http://www.sparkfun.com/products/10169
- See step 1
Arduino Pro Mini 5v: http://www.sparkfun.com/products/11113
- See step 2
Large Limited Rotation Servo (limited rotation makes it easier to program): http://www.sparkfun.com/products/9064
Wire (insulated!!)
Hot Glue
Electrical Tape (lots of electrical tape)
Soldering materials
Nuts, bolts, and other metal pieces used to attach servo to car trunk
Optional: Arduino Uno and breadboard (selectively conductive board used for prototyping)
Tools:
Soldering Iron (and accompanying equipment)
Wire Strippers
Plyers
Screw driver/wrench
Computer
FTDI basic for uploading code to arduino: http://www.sparkfun.com/products/9716
Other tools that you will find necessary
Picture: http://upload.wikimedia.org/wikipedia/commons/6/6c/Electronics_tools_and_material.jpg
This system uses a passive RFID system to activate a servo when the card-like tag is sensed. The reader is embedded in a empty cavity in the car where it is easily within range of a human. It is meant to be easy and helpful.
Parts list:
ID-20 Reader: http://www.sparkfun.com/products/8628
- See step 1
USB Reader (interface hardware for ID-20 to computer or arduino/microprocessor): http://www.sparkfun.com/products/9963
- Breakout (device) used to interface the ID-20 to the computer or arduino/microprocessor
Passive RFID tags (non-reprogramable ): http://www.sparkfun.com/products/10169
- See step 1
Arduino Pro Mini 5v: http://www.sparkfun.com/products/11113
- See step 2
Large Limited Rotation Servo (limited rotation makes it easier to program): http://www.sparkfun.com/products/9064
Wire (insulated!!)
Hot Glue
Electrical Tape (lots of electrical tape)
Soldering materials
Nuts, bolts, and other metal pieces used to attach servo to car trunk
Optional: Arduino Uno and breadboard (selectively conductive board used for prototyping)
Tools:
Soldering Iron (and accompanying equipment)
Wire Strippers
Plyers
Screw driver/wrench
Computer
FTDI basic for uploading code to arduino: http://www.sparkfun.com/products/9716
Other tools that you will find necessary
Picture: http://upload.wikimedia.org/wikipedia/commons/6/6c/Electronics_tools_and_material.jpg
Step 4: Setting Up the Electronics

When it comes to hooking up electronics, I recommend starting with the Arduino Uno. Its easier and less risky to setup, and is a great way to make sure the system works. I keep use my uno for prototyping and when I finish my system, I buy a pro mini and solder the wires to that (which proves to work better in the long term).
The flowchart below depicts the setup (scroll over the parts to learn more). Be careful when soldering, use a soldering heat sink (I learned this the hard way).
Another important lesson I learned was the use of female headers. Instead of soldering directly to the board, I soldered wires that were connected to female headers. Then I plugged in the components into these female headers. This may sound pointless, and even after testing with the uno, problems will still arise. With this setup, you can stay flexible, and when your completely done, you can just hot glue them the wire to the header.
The flowchart below depicts the setup (scroll over the parts to learn more). Be careful when soldering, use a soldering heat sink (I learned this the hard way).
Another important lesson I learned was the use of female headers. Instead of soldering directly to the board, I soldered wires that were connected to female headers. Then I plugged in the components into these female headers. This may sound pointless, and even after testing with the uno, problems will still arise. With this setup, you can stay flexible, and when your completely done, you can just hot glue them the wire to the header.
Step 5: Understanding the Code

Thanks to an unknown code writer for most of this code!
/////////////////////////////////////////////
#include <Servo.h> // Includes libraries (computer files) that include lines of code for the servo
Servo myservo; // Gives the servo a name
int RFIDResetPin = 0;
//Register your RFID tags here
char tag1[13] = "------------"; //First tag ID, I replaced the letters and numbers with a corresponding amount of dashes (i'd rather you
//not hack my system...)
char tag2[13] = "------------"; //Second tag ID
void setup(){ // everything within the void setup runs the code once on start-up
Serial.begin(9600); //Sets up a connection to the computer when prototyping, incredibly useful to figure out whats happening in
//the code because it can print lines of code onto a computer screen
myservo.attach(8); //Attaches the servo to a specific pin on the arduino, this is like the lane of a highway for information
myservo.write(178); // Sets the limited rotation (0-180 degrees) servo to 178, the idle position
pinMode(RFIDResetPin, OUTPUT); //Clears the slate for sensing a tag
digitalWrite(RFIDResetPin, HIGH); //puts it on "high alert"
}
void loop(){ //everything within the void loop is run through in a linear fashion over and over again
char tagString[0]; //the next couple of lines work with the incoming data to turn it into numbers and letters which form
int index = 0; //the ID tag
boolean reading = false;
while(Serial.available()){ //while there is a serial connection (while the reader is communicating to the board...)
int readByte = Serial.read(); //read next available byte //code that begins decoding (haha) the binary
if(readByte == 2) reading = true; //begining of tag
if(readByte == 3) reading = false; //end of tag
if(reading && readByte != 2 && readByte != 10 && readByte != 13){
//store the tag
tagString[index] = readByte;
index ++;
}
}
checkTag(tagString); //Check if it is a match
clearTag(tagString); //Clear the char of all value
resetReader(); //reset the RFID reader
}
void checkTag(char tag[]){ //Check the read tag against known tags
if(strlen(tag) == 0) return; //empty, no need to contunue
if(compareTag(tag, tag1)){ // if matched tag1, do this
servoGo(); //Activate the servo!
Serial.println("card 1 read"); //print "card 1 read" to the computer, helps see if the code reaches this point when and how it
//should
}
/*
else if(compareTag(tag, tag2)){ //if matched tag2, do this
servoGo(); //Activate the servo!
Serial.println("card 2 read");
}*/
/* else{
Serial.println(tag); //read out any unknown tag
Serial.println("unknown card");
}*/
}
void servoGo(){
Serial.println("Servo Activated"); //prints a line to the computer that tells me that its reaches this point
myservo.write(20); //writes the servo to a position that will pull the cord that pops the trunk
delay(500);
myservo.write(178); //resets the position for the next activation
delay(2000);
Serial.println("Servo Action Complete"); //prints a line to the computer confirming the completion of this method (external code of
//sorts)
}
/////////////////////////////////// The rest is code used to control the system that reads the code
void resetReader(){
//Reset the RFID reader to read again.
digitalWrite(RFIDResetPin, LOW);
digitalWrite(RFIDResetPin, HIGH);
delay(150);
}
void clearTag(char one[]){
//clear the char array by filling with null - ASCII 0
//Will think same tag has been read otherwise
for(int i = 0; i < strlen(one); i++){
one[i] = 0;
}
}
boolean compareTag(char one[], char two[]){
//compare two value to see if same,
//strcmp not working 100% so we do this
if(strlen(one) == 0) return false; //empty
for(int i = 0; i < 12; i++){
if(one[i] != two[i]) return false;
}
return true; //no mismatches
}
//picture: http://www.thinkgeek.com/images/products/additional/large/wrapping_paper-binary.jpg
/////////////////////////////////////////////
#include <Servo.h> // Includes libraries (computer files) that include lines of code for the servo
Servo myservo; // Gives the servo a name
int RFIDResetPin = 0;
//Register your RFID tags here
char tag1[13] = "------------"; //First tag ID, I replaced the letters and numbers with a corresponding amount of dashes (i'd rather you
//not hack my system...)
char tag2[13] = "------------"; //Second tag ID
void setup(){ // everything within the void setup runs the code once on start-up
Serial.begin(9600); //Sets up a connection to the computer when prototyping, incredibly useful to figure out whats happening in
//the code because it can print lines of code onto a computer screen
myservo.attach(8); //Attaches the servo to a specific pin on the arduino, this is like the lane of a highway for information
myservo.write(178); // Sets the limited rotation (0-180 degrees) servo to 178, the idle position
pinMode(RFIDResetPin, OUTPUT); //Clears the slate for sensing a tag
digitalWrite(RFIDResetPin, HIGH); //puts it on "high alert"
}
void loop(){ //everything within the void loop is run through in a linear fashion over and over again
char tagString[0]; //the next couple of lines work with the incoming data to turn it into numbers and letters which form
int index = 0; //the ID tag
boolean reading = false;
while(Serial.available()){ //while there is a serial connection (while the reader is communicating to the board...)
int readByte = Serial.read(); //read next available byte //code that begins decoding (haha) the binary
if(readByte == 2) reading = true; //begining of tag
if(readByte == 3) reading = false; //end of tag
if(reading && readByte != 2 && readByte != 10 && readByte != 13){
//store the tag
tagString[index] = readByte;
index ++;
}
}
checkTag(tagString); //Check if it is a match
clearTag(tagString); //Clear the char of all value
resetReader(); //reset the RFID reader
}
void checkTag(char tag[]){ //Check the read tag against known tags
if(strlen(tag) == 0) return; //empty, no need to contunue
if(compareTag(tag, tag1)){ // if matched tag1, do this
servoGo(); //Activate the servo!
Serial.println("card 1 read"); //print "card 1 read" to the computer, helps see if the code reaches this point when and how it
//should
}
/*
else if(compareTag(tag, tag2)){ //if matched tag2, do this
servoGo(); //Activate the servo!
Serial.println("card 2 read");
}*/
/* else{
Serial.println(tag); //read out any unknown tag
Serial.println("unknown card");
}*/
}
void servoGo(){
Serial.println("Servo Activated"); //prints a line to the computer that tells me that its reaches this point
myservo.write(20); //writes the servo to a position that will pull the cord that pops the trunk
delay(500);
myservo.write(178); //resets the position for the next activation
delay(2000);
Serial.println("Servo Action Complete"); //prints a line to the computer confirming the completion of this method (external code of
//sorts)
}
/////////////////////////////////// The rest is code used to control the system that reads the code
void resetReader(){
//Reset the RFID reader to read again.
digitalWrite(RFIDResetPin, LOW);
digitalWrite(RFIDResetPin, HIGH);
delay(150);
}
void clearTag(char one[]){
//clear the char array by filling with null - ASCII 0
//Will think same tag has been read otherwise
for(int i = 0; i < strlen(one); i++){
one[i] = 0;
}
}
boolean compareTag(char one[], char two[]){
//compare two value to see if same,
//strcmp not working 100% so we do this
if(strlen(one) == 0) return false; //empty
for(int i = 0; i < 12; i++){
if(one[i] != two[i]) return false;
}
return true; //no mismatches
}
//picture: http://www.thinkgeek.com/images/products/additional/large/wrapping_paper-binary.jpg
Step 6: Installing the System







This is where is really gets complicated. You will most likely not be installing your system onto a 2003 Mazda Protege, so you are going to have to get creative.
Key points to remember when installing system:
- Install the reader close to the surface of the car (less resistance = more range)
* Install the reader where the radio waves will not have to travel through metal!! (This is a low power system, if the waves have to travel through metal, they lose their energy and effectively block the communication between the tag and the reader)
- Use lots of wire, its better to have extra than to realize half way through the install that you need to solder on more wire
- Cover the reader with many, many, zip-lock bags and cover the entire system with waterproof electrical tape, make sure the tape extends to the wire (don't want a short causing a fire...)
- As for installing the servo: My car's trunk is not furnished and there is an accessible cord that pops the trunk. I attached the servo to this cord, when it rotates, it pulls the cord. There are convenient holes that I used for mounting the system. I used some flat metal pieces and nuts and bolts to attach the servo to the car, so far this has worked great.
- Put the system in a box ( doesn't have to be fancy) to protect the electronics from unnecessary crushing
- Try to be neat and not do damage to the car (I hope this one is obvious)
Key points to remember when installing system:
- Install the reader close to the surface of the car (less resistance = more range)
* Install the reader where the radio waves will not have to travel through metal!! (This is a low power system, if the waves have to travel through metal, they lose their energy and effectively block the communication between the tag and the reader)
- Use lots of wire, its better to have extra than to realize half way through the install that you need to solder on more wire
- Cover the reader with many, many, zip-lock bags and cover the entire system with waterproof electrical tape, make sure the tape extends to the wire (don't want a short causing a fire...)
- As for installing the servo: My car's trunk is not furnished and there is an accessible cord that pops the trunk. I attached the servo to this cord, when it rotates, it pulls the cord. There are convenient holes that I used for mounting the system. I used some flat metal pieces and nuts and bolts to attach the servo to the car, so far this has worked great.
- Put the system in a box ( doesn't have to be fancy) to protect the electronics from unnecessary crushing
- Try to be neat and not do damage to the car (I hope this one is obvious)
Step 7: Power Supply

Power Issues:
There are two main power systems that I considered: Battery power and power from the car. I choose to use battery power because its safer and won't run the risk of running down the car battery. It also makes it easier to maintain. I am using a 6v 4.5 amp hour battery that is rechargeable. This should be ample (pun intended) to power the system for a little while (months), but I have not yet tested this.
UPDATE (5/28/12) - Copied from my comment on this 'Ible:
I powered the arduino with a regular 9v (just a regular Duracell) and powered the servo separately with the same 9v. I had two sets of alligator clips connected to the 9v. One set was simply connected to the raw and ground pins on the arduino and the other set was sent to the ground wire for the servo and a variable voltage regulator which then went to the servo's vcc wire. This allowed me to play with the voltage values for the servo only. I was very surprised by what I found: the arduino ran fine with the 9v and strangely the servo ran best on 1.55v pulling 6.8 mA. I always thought this servo would take 5-6v but it clearly ran best on 1.55v.
Now I need to figure out how I can permanently power the system. I can find a battery that is 9v with a high amp/hour rating (am open to suggestions though) but need to find a power system for the servo now. I will probably try to connect it to the car like jwhitley suggested. Thanks again for the help everyone!
Problem: For some reason, whenever I plug in the battery, the system pulses as if a capacitor is hooked in series. This is strange because the same thing happens when the system is powered through the vcc port. The system works fine when powered by the computer, which is strange because this goes through the vcc port that was not working. It does not seem to work with any port. I thought it might be a problem with the voltage, so I created a variable voltage regulator. This keeps the voltage level at a constant rate, which I assumed would also help regulate the current (I=V/R). While the system would pulse less at certain voltages, the system proved stubborn. For now I am stuck experimenting in an to attempt to identify the problem.
To use the system, I use the FTDI basic, which for some reason, works...
Picture: http://www.amazon.com/UB645-Sealed-Lead-Acid-Batteries/dp/B0006N61RW
There are two main power systems that I considered: Battery power and power from the car. I choose to use battery power because its safer and won't run the risk of running down the car battery. It also makes it easier to maintain. I am using a 6v 4.5 amp hour battery that is rechargeable. This should be ample (pun intended) to power the system for a little while (months), but I have not yet tested this.
UPDATE (5/28/12) - Copied from my comment on this 'Ible:
I powered the arduino with a regular 9v (just a regular Duracell) and powered the servo separately with the same 9v. I had two sets of alligator clips connected to the 9v. One set was simply connected to the raw and ground pins on the arduino and the other set was sent to the ground wire for the servo and a variable voltage regulator which then went to the servo's vcc wire. This allowed me to play with the voltage values for the servo only. I was very surprised by what I found: the arduino ran fine with the 9v and strangely the servo ran best on 1.55v pulling 6.8 mA. I always thought this servo would take 5-6v but it clearly ran best on 1.55v.
Now I need to figure out how I can permanently power the system. I can find a battery that is 9v with a high amp/hour rating (am open to suggestions though) but need to find a power system for the servo now. I will probably try to connect it to the car like jwhitley suggested. Thanks again for the help everyone!
Problem: For some reason, whenever I plug in the battery, the system pulses as if a capacitor is hooked in series. This is strange because the same thing happens when the system is powered through the vcc port. The system works fine when powered by the computer, which is strange because this goes through the vcc port that was not working. It does not seem to work with any port. I thought it might be a problem with the voltage, so I created a variable voltage regulator. This keeps the voltage level at a constant rate, which I assumed would also help regulate the current (I=V/R). While the system would pulse less at certain voltages, the system proved stubborn. For now I am stuck experimenting in an to attempt to identify the problem.
To use the system, I use the FTDI basic, which for some reason, works...
Picture: http://www.amazon.com/UB645-Sealed-Lead-Acid-Batteries/dp/B0006N61RW
Step 8: Conclusion

It works (Except for the power issue)!!
