Introduction: Robotic Bird






This project shows you how to make a robotic bird that drinks water.
You can watch the bird working in the video.
The oscillator is made from a simple flip-flop circuit that is triggered when the bird touches one of the two contacts.
Supplies



You will need:
- gear box kit,
- DC motor (you do not need a high power motor, do not use low current motor that will not be able to rotate the big bird body mass),
- 2 mm or 1.5 mm wire,
- 0.9 mm wire,
- 9 V battery to power the relay or other battery if you cannot find 9 V relay. The circuit should work at 3 V minimum or even 2 V depending on components that you use. If you are using a 3 V power supply then use a relay that turns on at least 2 volts because the battery voltage will fall with time as the battery discharges,
- DPDT (double pole double throw) relay (12 V relay might work with 9 V),
- two 1.5 V batteries or adjustable power supply to power the dc motor. Two 1.5 V batteries placed in series will provide 3 V that is a typical voltage required for most small DC motors. However, the 3 V is not suitable for all motors. Use appropriate voltage for the motor to provide enough power to rotate the big metal bird body mass. Please check with specifications when you order online or purchase in the shop. This is why adjustable power supply could be a good idea.
- two general purpose PNP BJT (Bipolar Junction Transistor) (2N2907A or BC327),do not use BC547 or any other cheap low current transistors,
- two general purpose NPN BJT (2N2222 or BC337) or one general purpose NPN and one power transistor BJT NPN (TIP41C), do not use BC557 or any other cheap low current transistors, - two 2N2907A or BC337 transistors (you can use a TIP41C power transistor to drive the relay instead of 2N2907A/BC337), - three 2.2 kohm resistors,
- four 22 kohm resistors,
- one 2.2 ohm high power resistor (optional - you can use a short circuit),
- one general purpose diode (1N4002),
- soldering iron (optional - you can twist the wires together),
- wires (many colours).
Step 1: Assemble the Gearbox









Choose 344.2:1 gear ratio, which is maximum power and lowest speed.
You can purchase assembled gear box or use one from an old remote control car. If the speed is to fast you can always reduce the power supply voltage to the motor.
Step 2: Create the Stand for the Bird

The stand is made mostly from 2 mm hard wire. It is 10 cm long, 10 cm wide and 16 cm in height.
Step 3: Create the Body of the Bird


The bird is 30 cm in height and made mostly from 2 mm hard wire.
After you make the bird you attach it to the gears from 0.9 mm wire.
Try to make the bird body as small as possible yet make sure it touches the wire terminals. Using a 1.5 mm metal wire instead of 2 mm metal wire will reduce the bird body weight an increase the chances of this moving sculpture actually working because the small DC motor might not be able to move the big bird body mass.
Step 4: Attach the Bird to the Stand

Attach the bird to the stand with 0.9 mm wire.
Step 5: Attach Electronic Terminals



Attach the front and back terminals. The back terminal is made from 0.9 mm wire bend in the shape of half circle (please look closely at the image).
Then attach the 2 mm wire to complete to front terminal.
Step 6: Make the Circuit
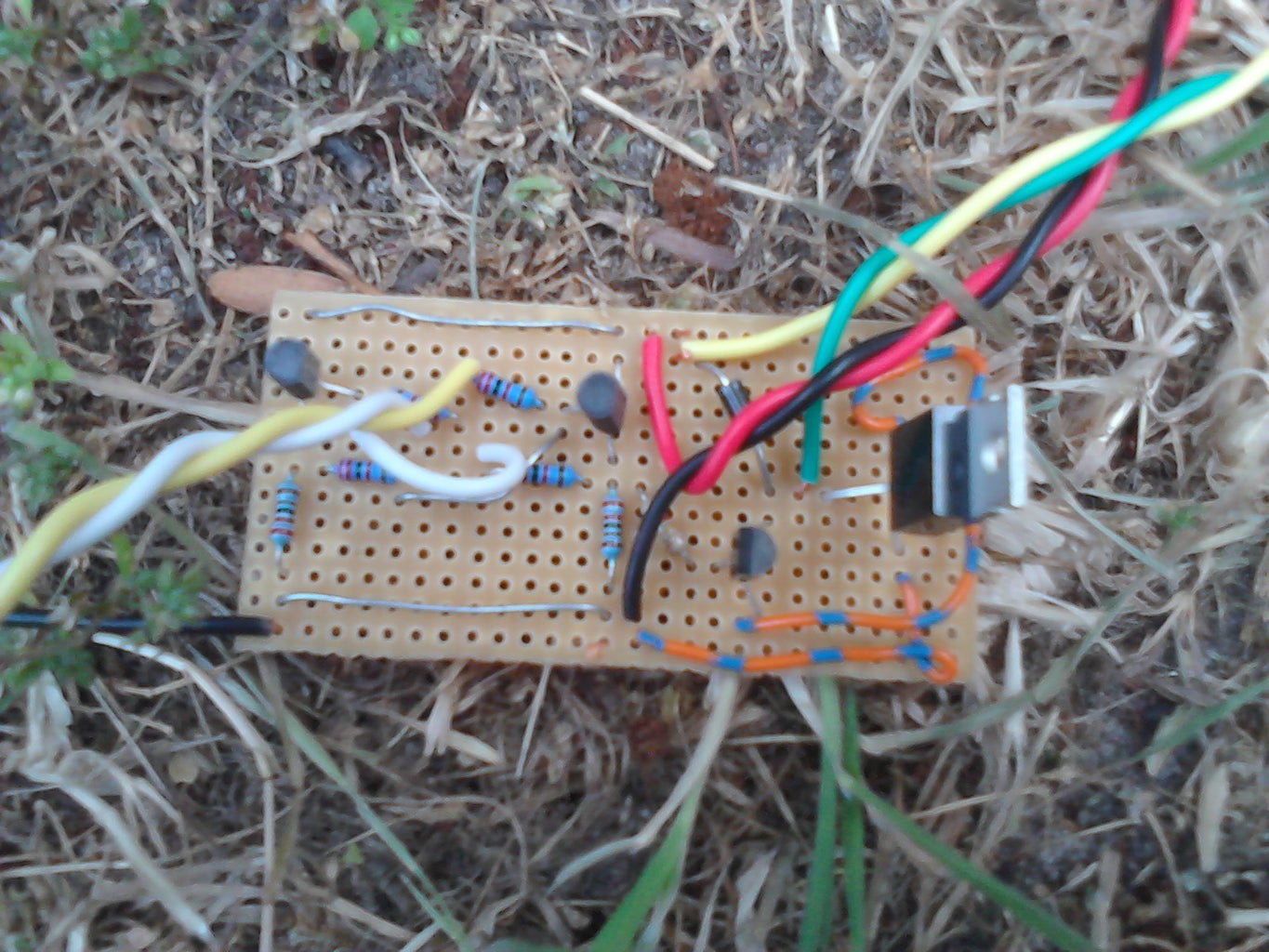


The circuit is shoing is a flip-flop circuit that controls the relay.
The "bird front" is the front terminal.
The "bird stand" is the back terminal connection.
The circuit shown is displaying two voltage controlled switches. In reality there are two mechanical switches (the two terminals you attached in the previous step) and voltage controlled switches were only included in the circuit because PSpice software does not allow mechanical components and only simulates electronic or electrical circuits.
The 2.2 ohm resistor might not be needed. This resistor is used if the relay has high inductance is a short circuit for a long time until it turns on. This might burn the power transistor. If you do not have a power transistor than place a few NPN transistors in parallel, connecting all three terminals to each other (connect base to base, collector to collector and emitter to emitter). This method is used to redundancy and to reduce the power dissipation across each transistor.
The heat sink on the transistor is not included. Because the transistor is saturated the power dissipation is very low. However, the power dissipation depends on the relay. If the relay consumes high current then heat sink should be included.
The heat sink dissipation models are shown in the circuit simulation. You can use any of the two. In the two models a circuit analogy is used for model temperatures. If there is no cooling fan and no encasement than the corresponding heat resistance is zero. You have to assume that the device might become hot inside the box. The power dissipation is the current, the temperature is the voltage potential and the resistance is the heat resistance.
This is how you choose the heat sink resistance and case to heat sink resistance:
Power Dissipation = Vce (collector emitter voltage) * Ic (collector current)
Vce (collector emitter voltage) = 0.2 volts (approximately) during saturation. Ic = (Power supply - 0.2 V) / Relay Resistance (when on)
You can connect an ammeter to check how much current the relay consumes when on.
Heat Sink Resistance + Case To Heat Sink Resistance = (Maximum Transistor Junction Temperature - Maximum Room or Ambient Temperature) / Power Dissipation (Watts) - Junction To Case Heat Resistance
Maximum Transistor Junction Temperatures and Junction To Case Heat Resistances are specified in the transistor specifications.
Case To Heat Sink Resistance depends on the heat transfer compound, thermal washer material and pressure mounting.
Thus the higher is the power dissipation, the lower should be the heat sink resistance. Larger heat sinks will have lower heat resistances.
A good option is to choose a heat sink with a low heat resistance if you do not understand those formulas.
Step 7: Attach the Relay



The relay does not have to be a high current relay. In fact it must be a low current relay. However, keep in mind that the motor will draw high currents if it stops due to mechanical issues such as problems with gear box. This is why I decided not use transistors to drive the motor. However, there are H bridge transistor circuits and H bridge resistor circuits that can used to drive motors.
Step 8: Connect Power


The project is now complete.
You can see the bird working in the video.