

Introduction: Robotics Remote Control Rock Crawler Arduino


This looks and is very barebones. I would recommend whoever wanting to do this project consider some way of covering the electronics to protect against water and dirt.
Step 1: Things You Need

-Arduino MEGA
-Arduino UNO
-2x Joysticks
-2x 2.4GHz Transceivers
-Any chassis with at least two motors (for steering and power)
-This project has three motors (an additional one for front-wheel-drive)
-Battery pack for motors
-2x Motor Control Units (two are needed for part-time all-wheel-drive only)
-2x 9 volt batteries for arduino's
-Arduino extension shield
-Power switch for motors (optional)
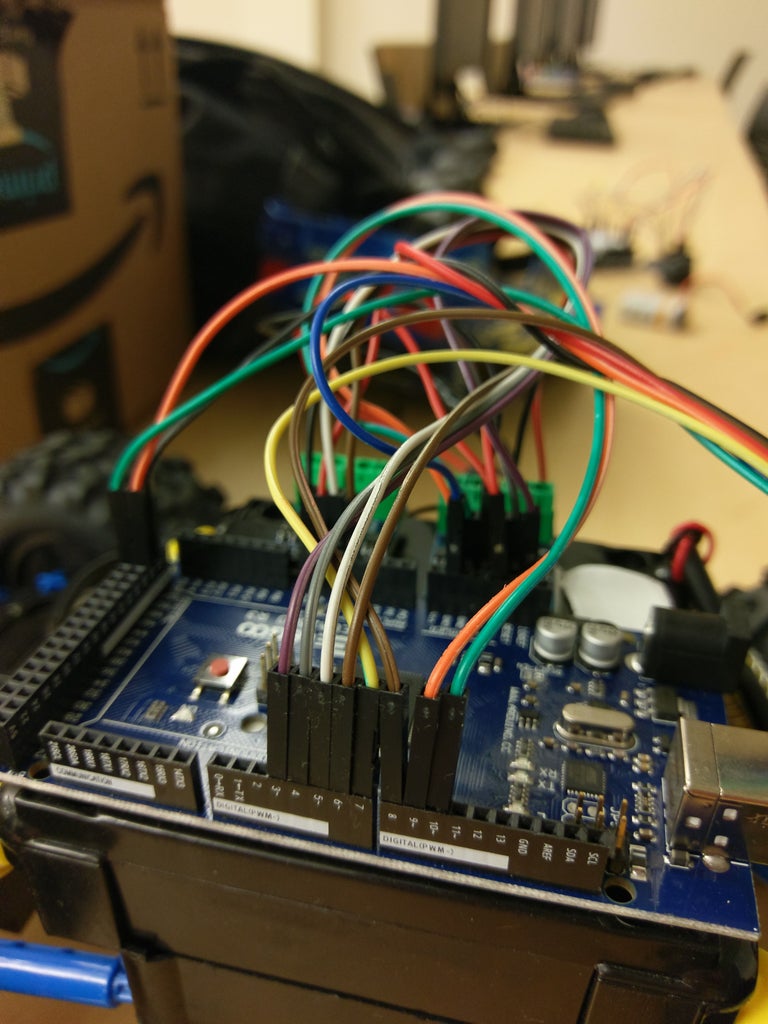
Step 2: Assembling the Controller
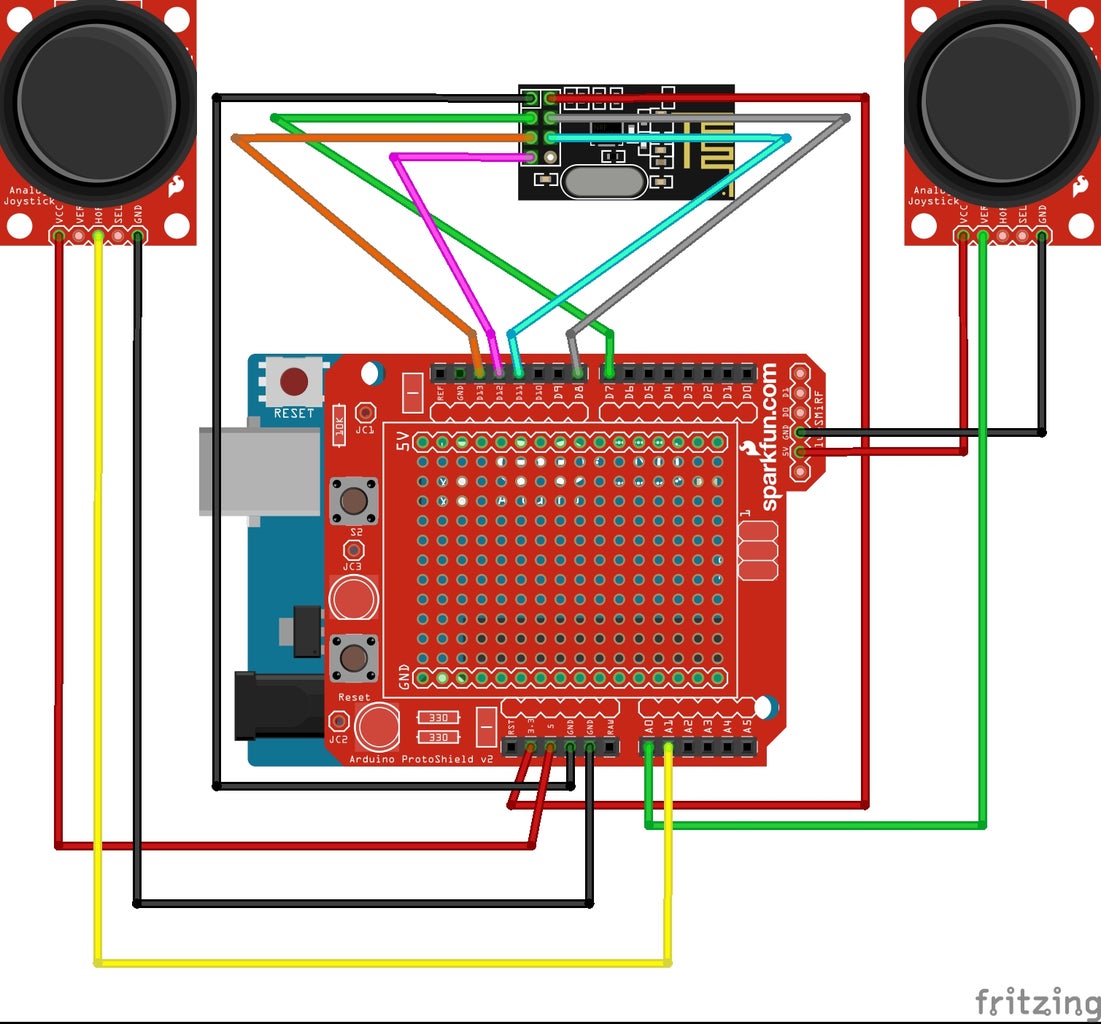



For the controller you will need an Arduino UNO with an extension shield, two joysticks, one 2.4GHz transceiver, and one 9v battery.
The extension shield is used for more GND and 5V pins, this will make the project easier as you wont need to do any soldering for the controller
Begin by wiring the joysticks to the Arduino. Remember that one joystick is responsible for the X movement, while the other is responsible for the Y movement. The extension shield is required in order to power both joysticks and the transceiver.
Joystick 1 will be wired for x-axis(throttle),
You can wire the SW(joystick switch) if you want to enable switching between 4WD and 2WD(but that is not implemented in this)
Joystick 2 will be wired for y-axis(steering)
Next, you'll want to begin wiring the transceiver as follows
Transceiver pins ---- Arduino pins
GND 1 ---- GND
VCC 2 ---- 3.3V
CE 3 ---- 7
CSN 4 ---- 8
SCK 5 ---- 13
MOSI 6 ---- 11
MISO 7 ---- 12
IRQ 8 ---- not connected
Step 3: Assembling the Car
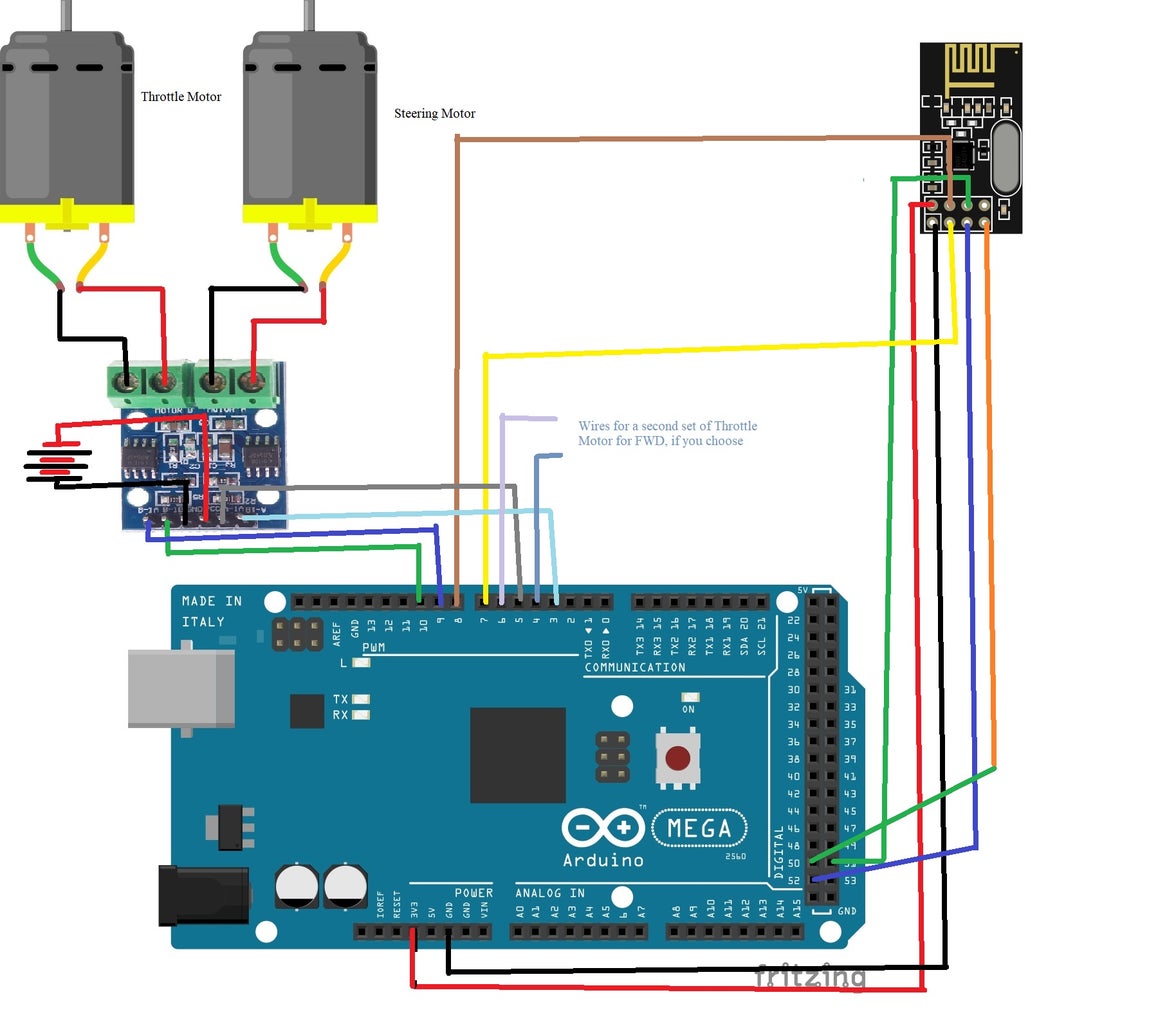

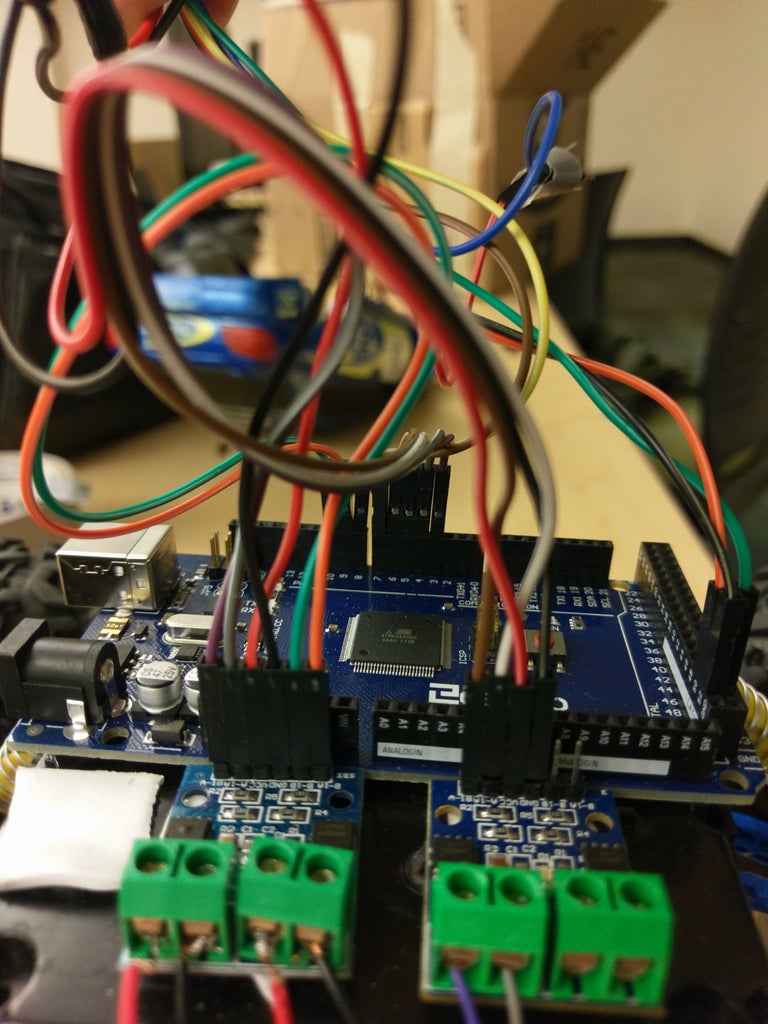
For this, you will need your chassis with motors, Arduino MEGA, two motor control units, one 2.4GHz transceiver, and one 9v battery.
We began by wiring the motors to the motor control units. Remember that there's three motors involved (each with two wires), so one motor control unit will be only half-wired.
Next, you'll want to wire the motor control units to the MEGA. Remember the which pins you used for motor direction as you'll need those in the code.
Afterwards you can begin wiring the transceiver to the MEGA. The pins won't be the same as on the UNO because of the way the MEGA handles communication.
Wiring for Pins 4 and 6 are left open. In the codem they were wired for the front wheels. But if you choose to have it RWD only, you will not need to wire these.
Transceiver pins ---- Arduino pins
GND 1 ---- GND
VCC 2 ---- 3.3V
CE 3 ---- 7
CSN 4 ---- 8
SCK 5 ---- 52
MOSI 6 ---- 51
MISO 7 ---- 50
IRQ 8 ---- not connected
Step 4: The Code
Car.ino gets uploaded into the MEGA
Controller.ino into the UNO
If you want to use the Serial monitor for debugging purposes, make sure to set the baud rate to 115200.

