

Introduction: Servo Controlled Prosthetic Hand

Hi, here I am making a prosthetic hand controlled by servos to make it grip. I am making a right hand but I included the files to print a left palm as well. The assembly is the same for both left and right hands.
Step 1: Printing the Parts
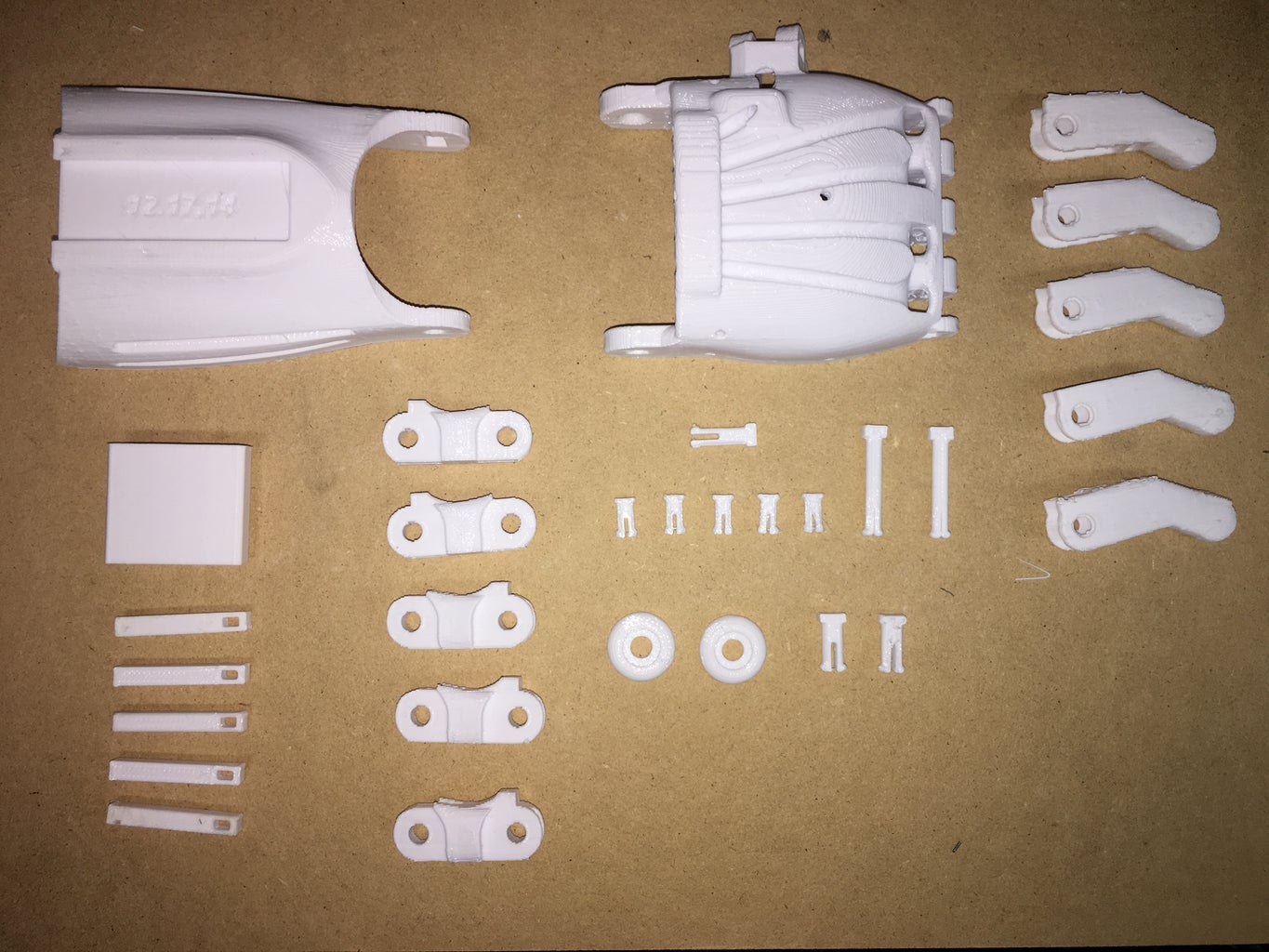
- Download the stl files attached to print out the parts of the hand.
- The parts you will need are:
- 1 Wrist
- 1 Right Palm OR Left Palm
- 2 Wrist Pins
- 2 Wrist Pin Caps
- 5 Fingertips
- 5 Finger Pins
- 5 Proximals
- 2 Knuckle Pins
- 1 Thumb Pin
- 1 Servo Mount
- Make sure to shave off any supports or any excess plastic.
Attachments











Step 2: Assembly of the Hand



- If your pin is not going in, try:
- Pinch the two prongs of the pins to make them smaller to go through the whole.
- Use a small mallet to force the pins in.
- Shave any pins or holes down with a file so they fit more easily.
Step 3: Stringing the Hand


- You will now string the hand with two things: elastic and fishing wire.
- In my pictures, the fishing wire is the greenish color and the elastic is black.
- The fishing wire is used to pull the fingers so it needs to be strong.
- Elastic should be a rope like elastic no more than 1.5 mm in diameter.
- First string the elastic:
- Cut 5 pieces of small elastic rope measuring from the tip of the finger to the bottom of the palm
- Tie one end on the little bar on the top of the finger closest to the tip.
- Thread it under the other bar, through the small hole on the proximal, and through its respective channel on the top of the palm.
- Tie it around its respective hole on the bottom of the palm and cut off any excess.
- Next string the fishing wire:
- Cut 5 pieces of fishing wire measuring from the tip of the finger to the bottom of the palm.
- Tie one end on the bar near the tip of the finger on the BOTTOM of the finger.
- Thread it through the channel on the bottom of the finger.
- Next, thread it through the hole so it comes out on the top of the palm.
- Thread it through its respective channel on the palm with the elastic from the same finger.
- Thread it through the hole where the elastic is tied but DO NOT tie it around the hole.
- Just leave the fishing line laying there for now.
Step 4: Setting Up the Arduino Board

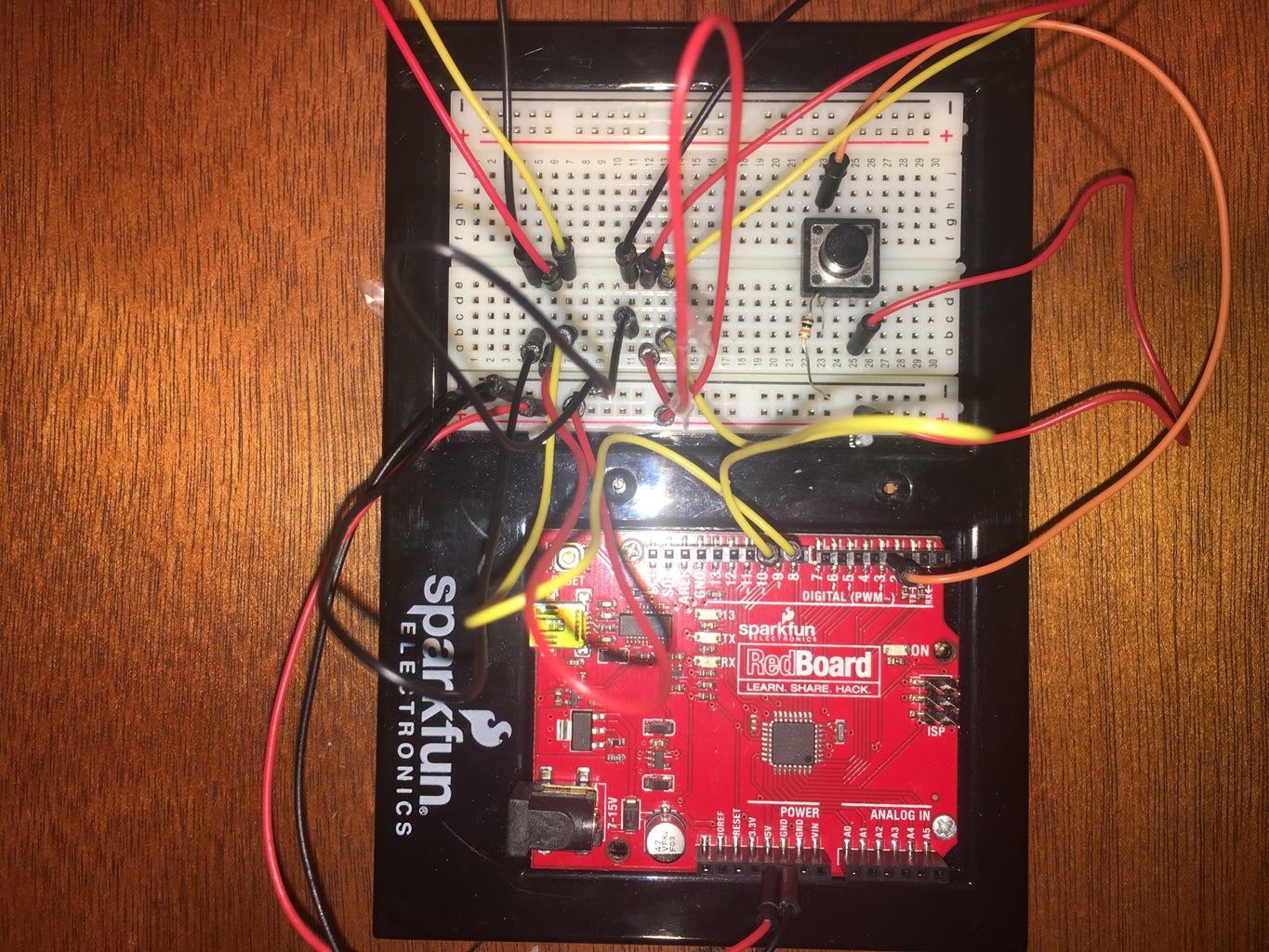





Follow the pictures very meticulously on where to put the pins, and then plug the Arduino board into a computer.
Here are some details:
- I use PIN 3 for the push button
- I use PIN 9 for servo 1
- I use PIN 10 for servo 2
- I use a 10k resistor for the pushbutton
I am using 2 standard 180 servos.
Step 5: Coding the Servos
Basically, what the code does is telling the servos that when I push the button the servos will go to a set position and stay there until I release on the pushbutton. When that happens the code tells them to go back to their original spot and stay there until the pushbutton is pushed again.
Here are some details:
- I have servo 1 going to PIN 9 and servo 2 going to PIN 10.
- I have the pushbutton going to PIN 3.
Here is the code:
#include
int pos = 0;
Servo servo1;
Servo servo2;
void setup() {
pinMode(3, INPUT);
servo1.attach(9);
servo2.attach(10);
}
void loop() {
while (digitalRead(3) == HIGH ) {
servo1.write(440);
servo2.write(172);
}
while (digitalRead(3) == LOW ) {
servo1.write(0);
servo2.write(15);
}
}
Step 6: Mounting the Servos



- Slide the clip on the bottom of the mount into the channel on the wrist.
- You can shave the clip down with a file if it is too big.
- You can also hot glue the clip into the channel in so it does not slide around.
- Slide both servos in the mount:
- Make sure they are upside down.
- Make sure the arm of the servo is closest to the palm.
- Make sure the servos are sitting in the mount, but are far away enough from each other so the arms don't collide.
- Hot glue the servos in place so they don't move.
- Tie 3 loose fishing line ends to one to the hole on the end of the servo arm.
- Tie the other 2 loose ends on the hole on the end of the other servo arm.
Step 7: Padding

I did not use padding or straps because my hand was not going to be put to use.
If you wish to put on padding and straps, here's a link to a video explaining how to do it:
- Materials: https://www.youtube.com/watch?v=ql7Uy_WDKyo&t=0s&index=14&list=PLA7_By5ei42zmZThuTbNQOQCmkE4qloEA
- Padding: https://www.youtube.com/watch?v=_FftDYzVe2o&index=14&list=PLA7_By5ei42zmZThuTbNQOQCmkE4qloEA
- Straps (part 1): https://www.youtube.com/watch?v=JhAWUqAqRVE&list=PLA7_By5ei42zmZThuTbNQOQCmkE4qloEA&index=15
- Straps (parts 2): https://www.youtube.com/watch?v=yPLFowuJZoE&list=PLA7_By5ei42zmZThuTbNQOQCmkE4qloEA&index=16
Step 8: Using You Prosthetic Hand

- To grip the hand push the push button and hold until you wish to release. When you stop pressing the push button the hand will stop gripping.
- Feel free to ask me any questions about the hand.
- Enjoy!!
