Introduction: Tensegrity or Double 5R Parallel Robot, 5 Axis (DOF) Inexpensive, Tough, Motion Control









I hope you will think this is the BIG idea for your day! This is an entry in the Instructables Robotics competition closing Dec 2 2019.
The project has made it to the final round of judging, and I haven't had time to do the updates I wanted! I've been off on a tangent that's related but not directly, more to come on that. To keep up Follow me! and please comment, I'm an introverted exhibitionist so I love seeing your thoughts.
Also, I'm hoping for some help on the electronics of 5R linkage version of my project, I've got both Pi's and Arduino's and a driver shield for it, but the programming is a bit beyond me. It's at the end of this.
I haven't spent any time on this, but I'd love to get the unit I've printed into someone who's got time to work on it's hands. If you want it, leave a comment, and be ready to pay shipping. Including the board it's mounted too, it's about 2.5 kg. I'll supply an arduino and motor shield, and it's got the 5 servo's mounted. Anyone who wants it will have to pay the shipping from Nelson BC.
If you are interested in BIG Robots, FAST Robots, and New Ideas, Read on!!
This describes a couple of what I think are new ways to make a 5 axis robot limb, arm, leg, or segment as a Tensegrity or as a Delta+Bipod version of 5R kinematics.
3 axis limbs, like used on the Boston Dynamics Big Dog, allow a foot to be placed in 3D space, but can not control the angle of the foot relative to the surface, so the feet are always round, and you can't easily have toes, or claws to dig in or stabilize. Climbing can be tricky as the round foot naturally rolls when the body moves forward.
A 5 axis limb can place and keep it's "foot" at any angle desired, as it's body moves, on any point within it's working range, so 5 axis has more traction, and can climb or maneuver with more foot or tool placement options.
These idea's will hopefully allow you to see how to create and maneuver a 5 axis"leg" in 3 axis space (even if it's very large), without having the leg itself carry the weight of the actuators. A leg as a kind of powered tensegrity, which may not have structure like we generally think of it, no hinges, no joints, just powered winches!
The lightweight "leg"can be moved very quickly and smoothly, with lower inertial reaction forces to manage than a heavy leg and all it's hinges, with it's drive motors attached to it.
The actuation forces are widely distributed, so the limb can be very lightweight, stiff, and be resilient in overload situations as well as not impose large point loads on it's mounting structure. The triangulated structure (a sort of parallel, powered hinges), brings all forces on the system into alignment with actuators, allowing for a very stiff and lightweight 5 axis system.
In the next stage of releasing this idea, an instructable or 2 from here, I'll show some ways to add a powered 3 axis ankle, with the power and mass of the added axis's also on the body, not the limb. The "ankle" will be able to rotate left and right, tilt a foot or claw up and down, and open and close the foot or 3 point claw. (8 Axis or DOF)
I came to all this through learning and thinking about Tensegrity so I'll spend a moment going over that below.
Tensegrity is a different way of looking at structure.

Tensegrity may be the basic structural system for our evolved anatomy, from cells through to vertebra, the principles of tensegrity seem to be involved, especially in systems where motion is concerned. Tensegrity has become the study of Surgeons, biomechanisist's and NASA roboticist's, looking to understand both how we work, and how machines can get some of our resilience, efficiency, and light weight rugged structure.

{kind=link}
One of Tom Flemon's early spine models
I'm fortunate to have lived on Salt Spring Island with one of the worlds great resources about Tensegrity, Researcher and inventor Tom Flemons.
Tom passed almost exactly a year ago, and his website is still maintained in his honor. It is a great resource for Tensegrity in general, and especially for Tensegrity and Anatomy.
Tom helped me to see that there was room for more people to work on how to apply tensegrity to our lives, and by using its principles of reducing structure to its minimal components, we could have systems that are lighter, more resilient, and flexible.
In 2005, in talking with Tom, I came up with an idea for a controllable tensegrity based robotic limb. I was busy with other things, but wrote a short brief on it, for my notes mostly. I didn't circulate it very widely, and it's mostly just percolated since then with me occasionally talking it over with people.
I've decided that since a part of my problem in developing it further is that I'm not much of a programmer, and for it to be useful, it's got to be programmed. So I've decided to release it publicly, in the hopes that others will get on board and make use of it.
In 2015 I tried to build an Arduino controlled winched tensegrity system, but both my programming skills were not up to it, the mechanical system I used was underpowered, among other issues. One big issue I found is that in a cable driven tensegrity version, the system needs to maintain tension, so the servo's are constantly loading each other and need to be very accurate. It wasn't possible with the system I tried, in part because the inaccuracy of RC servo's make it difficult to have 6 consistently in agreement. So I put it aside for a few years.... Then

Last January while I was working on upgrading my Autodesk 360 Fusion drafting skills, and looking for projects to build with my 3D printer, I started thinking about it again, more seriously. I had been reading up on cable driven robotic actuation and programming them still seemed like something more complex than I could handle. And THEN this summer, after looking at many delta robots and 5R parallel motion systems, I realized they could be combined, and it would be another, non-tensegral, way of realizing the 5+ axis movement I'd envisioned in my tensegrity robot. It would also be doable with RC servo's as none of the servo's work in opposition to another, so position inaccuracy wouldn't shut it down.
In this instructable I will talk about both systems. The tensegral, and the twin 5R parallel. At the end, by the time the contest is done, I'll have all the printable files for the twin 5R ART limb, included here.
I will also include the 3D printable parts for the Tensegral version of my ART limb robotic simulator. I'd love to hear from people who think they can work out the winchs and controls to make a powered unit. At this stage, they may be beyond me, but the cable driven, Tensegrity based systems are likely to be lighter, faster and have lower part counts, as well as being more resilient during overloads and crashes. I think they will require much more dynamic control strategies, with the system likely functioning best with both position and load feedback.
The alternative, the ART limb as a layered or twin 5R parallel, that I describe at the end here does not require any actuator to work against another so will be more tolerant of position error, and it reduces the minimal number of actuators from 6-8 to 5. Eventually I'll build multiple versions of both, and use them to build my own walking Mecha, but that's for later.... For now.....
Step 1: A Tensegrity Robot From a Reflected Pair of Tetrahedron's?



 Why Tensegrity?
Why Tensegrity?
What are the advantages of having a leg suspended in a tension net of high speed precision winches?
FAST, EFFICIENT, LOW COST,
In design when you have to move something from A to B, you often have the choice, push the object, or pull the object. Something that designers like Buckminster Fuller have shown is that there are some big benefits to pulling over pushing. Although Bucky is known for his domes, his later quake resistant buildings were most often concrete core towers, with the floors arranged to be hanging from a mushroom like top.
Tension elements pull, like a cable or chain, they escape from having to carry the buckling loads that pushing (or compression) elements face and because of that they can be much lighter. A hydraulic cylinder and apparatus to lift an elevator might weight 50 tones, where a cable system might weigh only 1.
So a Tensegral leg or limb can be fast, light and stiff, and still be resilient to overloading in all axis.
Step 2:


What's the ideal geometry? Why the Overlapping Triangles?How Many Cables?
With this overlapping tensegrity geometry a wider range of motion can be created. In this orange coloured example I've used reflected pyramids (4 control lines per end) as the structure, instead of the reflected tetrahedrons I used in the pink coloured example, 8 cables instead of 6. The increase to four mooring points for each end(at the 12,3,6,9 positions) give a larger area of motion. In the 3 mooring point pink geometry, there are more singularities possible where the boom can "pop" out of the controlled area. Increasing the number of mooring points could also build redundancy.


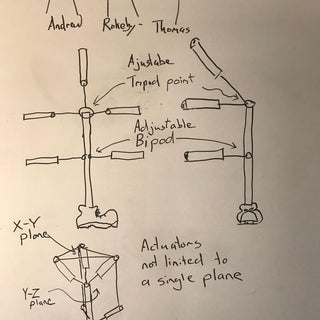
Step 3: Delta Plus Bipod = 5 Axis Leg




A Pair of 5R Parallel Robots + One more = 5 axis movement
What I've come to see is that for controlling a 5 axis "leg", a simple mechanism is to use a pair of independent 5R linkages, as well as a 5th single link to controllably tilt the pair of 5R links.

I've got a bunch more to add, but wanted to get this out there so that I could get some feedback on it.