

Introduction: 3D Printed Gripper



Step 1: Components Designed in Solidworks






The four holes on the bottom of the first part allow me to connect the gripper with screws to the KUKA robotic arm.
Step 2: Assembly






First of all, the servo motor is connected to Part1. Than we can link Part1 to Part2. The upcoming steps are easily traceable based on the pictures.
Step 3: Motion Test in Solidworks





Mechanism: I had to transform the rotational motion into linear motion which can be understood based on the video and pictures I attached. If I rotate the motor with 106 degrees the finger is going to move approximately 50 mm. I calculated this range with a simple sketch in Solidworks.
Step 4: 3D Printing




Since I do not have a 3D printer I had to order the printing method. The owner of the printer sent me some pictures of the parts. The parts of the 3D model were saved in STL format to be 3D printed. The gripper was made of PLA and it cost me about 50 dollars.
Step 5: Assembling the Printed Parts



Step 6: Linking the Gripper With KUKA Robotic Arm




Step 7: Arduino Code and Wiring

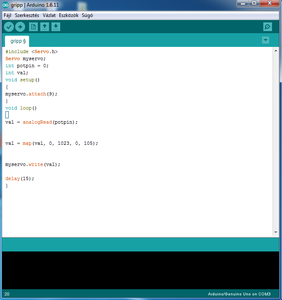
#include
Servo myservo;
int potpin = 0;
int val;
void setup()
{myservo.attach(9);
}
void loop()
{val = analogRead(potpin);
val = map(val, 0, 1023, 0, 105);
myservo.write(val);
delay(15);
}
