

Introduction: Arduino - Motion Following Car

Hello, everyone!
Here I will be showing you how to build a motion following car. This project is based on two other similar ones and I recommend you check them both out to get a better idea of the layout for this project (https://www.instructables.com/id/Arduino-Ultimate-Obstacle-Avoiding-Robot/ and https://www.instructables.com/id/Motion-Following-Robot/).
Here is what you will need:
A body for the car. You can use a repurposed RC car, but I used this one: (https://www.amazon.ca/Car-Chassis-Kit-Battery-Encoder/dp/B01EIYJARW/ref=sr_1_1?ie=UTF8&qid=1492135756&sr=8-1&keywords=car+chassis). Whatever you choose, it should have a base, wheels, and two motors.
An Arduino Uno microcontroller chip
A motor driver chip. I used this one: https://www.amazon.ca/XD-56-HG7881-HG7881CP-motor...
Two 4 pin ultrasonic sensors
Two power sources - one for the motors and one for the Uno. I used 4 AA batteries for the motors and a 9V for the Uno
A mini breadboard
And a bunch of jumper wires to connect everything together (male-male as well as male-female)
Step 1: Wiring Everything Together




First thing to do is figure out where you want the parts to be placed on the car body and find a way of sticking them down (I just used double sided mounting tape). The ultrasonic sensors should be placed on the front of the car and the motor driver can be placed on top of the 9V battery to make it fit. Once you have everything in place you can start by attaching wires to the motors and ultrasonic sensors. I tried to use the same colour of wire for each part to make things a bit more clear. Ultrasonic sensor wires for both sensors are: echo - green and trig - yellow. Motor driver wires are: B-IA and A-IA - blue and B-IB and A-IB - purple. Red for positive and black for negative terminals were used as much as possible.
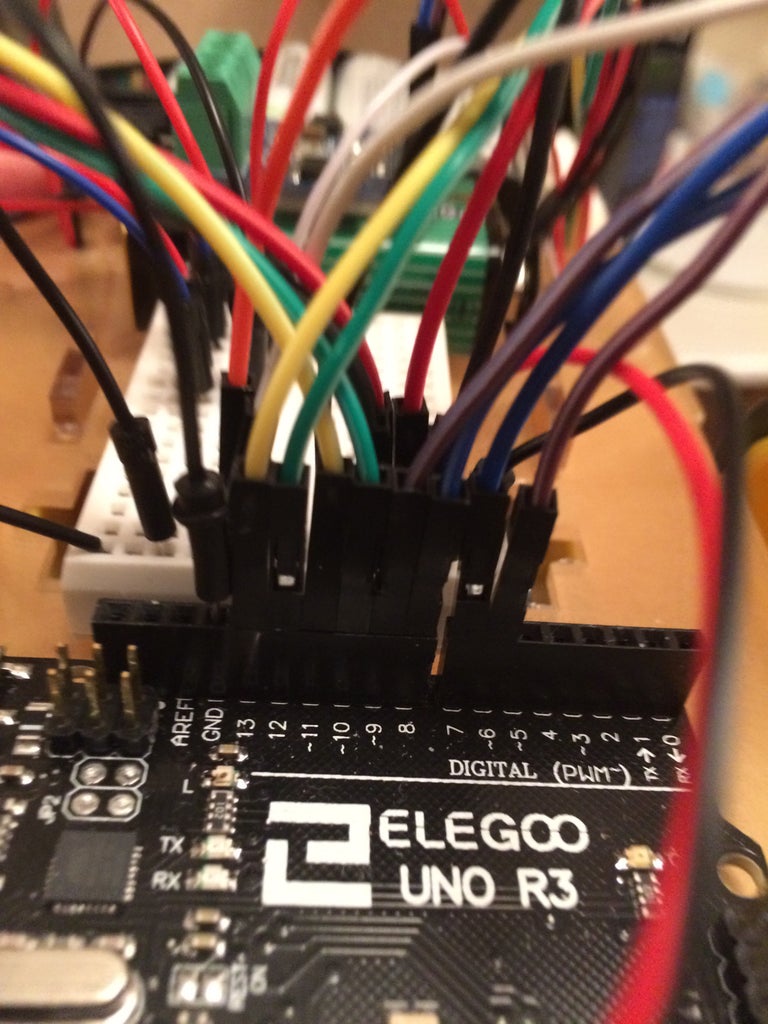
Once you have the components wired you can attach them to the Arduino and each other (via the breadboard). Here is how everything was attached to the Uno board:
Arduino pin ~6: purple to B-IB
pin 7: blue to B-IA
pin 8: blue to A-IA
pin ~9: purple to A-IB
pin ~10: green to left echo pin **This is left and right when viewed from the back looking forward
pin ~11: yellow to left trig pin
pin ~12: green to right echo pin
pin ~13: yellow to right trig pin
At this point you should have all the sensors wired to the Arduino, and now you just need the power and motors! I connected wires from the 5V and GND Arduino pins to separate lines of the breadboard, then attached the positive and negative leads from the ultrasonic sensors to the same lines on the breadboard. On the same lines I also attached the positive and negative leads from the 9V battery.
On the other side of the breadboard I attached the motor driver positive and negative leads to the positive and negative leads of the 4 AA batteries. I also added a wire from the negative line to a GND pin on the Arduino.
The last part is to attach the leads from the motor driver "Motor A" to the leads from the right motor and the leads from "Motor B" to the left motor and you should be done!
Step 2: Code
This code runs in the Arduino IDE and it shouldn't require any additional libraries. I have included the file or you can copy and paste it from below.
/*
Code for creating the Arduino following car.
*/
const int motorR_A = 8; // (pwm) pin 9 connected to pin A-IA
const int motorR_B = 9; // (pwm) pin 8 connected to pin A-IB
const int motorL_A = 7; // (pwm) pin 7 connected to pin B-IA
const int motorL_B = 6; // (pwm) pin 6 connected to pin B-IB
const int Lin = 10, Rin = 12, Lout = 11, Rout = 13; //Sets up the ultrasonic sensor input and output
long Rduration, Lduration, Rcms, Lcms; // Duration of ultrasonic pulse and resulting distance in cms
int threshold = 25;
boolean debug = true; // Starts the serial monitor
byte speed = 100; // change this (0-255) to control the speed of the motors
void setup()
{ if (debug)
{ Serial.begin(9600); }
pinMode(motorR_A, OUTPUT); // set pins to output
pinMode(motorR_B, OUTPUT);
pinMode(motorL_A, OUTPUT);
pinMode(motorL_B, OUTPUT);
pinMode(Rout, OUTPUT); // sets pins for ultrasonic sensors
pinMode(Rin, INPUT);
pinMode(Lout, OUTPUT);
pinMode(Lin, INPUT);
}
void loop()
{
digitalWrite(Rout, LOW); // Pulses for the right sensor.
digitalWrite(Rout, HIGH);
delayMicroseconds(2);
digitalWrite(Rout, LOW);
Rduration = pulseIn(Rin, HIGH);
digitalWrite(Lout, LOW); // Pulses for the left sensor
digitalWrite(Lout, HIGH);
delayMicroseconds(2);
digitalWrite(Lout, LOW);
Lduration = pulseIn(Lin, HIGH);
Rcms = microsecondsToCms(Rduration);
Lcms = microsecondsToCms(Lduration);
if (debug) {
Serial.print("Left: ");
Serial.print(Lcms);
Serial.println(" cms");
Serial.print("Right: ");
Serial.print(Rcms);
Serial.println(" cms"); }
follow(); }
long microsecondsToCms(long microseconds) {
// // Converts pulse time to a distance in cms
return microseconds / 2 / 29.1; }
void follow()
{
if (Lcms == threshold || Rcms == threshold) {
analogWrite(motorR_A, 0); // car stops if an object is too close
analogWrite(motorR_B, 0);
analogWrite(motorL_A, 0);
analogWrite(motorL_B, 0);
Serial.print(" Stopping!"); }
if (Lcms > threshold) {
left();
Serial.print(" Moving left!"); }
if (Rcms > threshold) {
right();
Serial.print(" Moving right!"); }
if (Lcms > threshold && Lcms < 60) { // Moves forward if the car is within this range
forward();
Serial.print(" Moving forward!"); }
if (Rcms > threshold && Rcms < 60) {
forward();
Serial.print(" Moving forward!"); } }
// methods for driving the motors in each direction. Backward isn't used here, but could be.
void forward() {
analogWrite(motorR_A, 0);
analogWrite(motorR_B, speed);
analogWrite(motorL_A, 0);
analogWrite(motorL_B, speed); }
void backward() {
analogWrite(motorR_A, speed);
analogWrite(motorR_B, 0);
analogWrite(motorL_A, speed);
analogWrite(motorL_B, 0); }
void left() {
analogWrite(motorR_A, speed);
analogWrite(motorR_B, 0);
analogWrite(motorL_A, 0);
analogWrite(motorL_B, speed); }
void right() {
analogWrite(motorR_A, 0);
analogWrite(motorR_B, speed);
analogWrite(motorL_A, speed);
analogWrite(motorL_B, 0); }
Attachments

Step 3: Final Tests
Here is a video of my car running. The car should follow your hand, foot, etc. when it's placed in front of the sensors, in the closest direction (i.e. move right if the object is closest to the right sensor). If it isn't working as expected, you might have the motor leads positive and negative flipped so the motor is running in the opposite direction.
I hope this has been helpful and good luck building your own car!
