Introduction: Elegoo Arduino Smart Robot Car Kit








You can purchases this car from Amazon.
It comes with everything you need, including batteries, Codes and Library's.
Also Comes with a data disk with a step by step guide in the from of a PDF File.
Step 1: Assambly Motors


Step 2: Mount Motors to Bottom Base Plate



Remove the protective paper from the base plate.
Note how the motors are mounted. You may need to reassemble the motors so the aluminum block is in the right spot.
You do not need to fully tighten the motors now. Just tighten enough so they stay on. You will need to adjust them later after you install the wheels.
Step 3: Install the Motor Driver Board
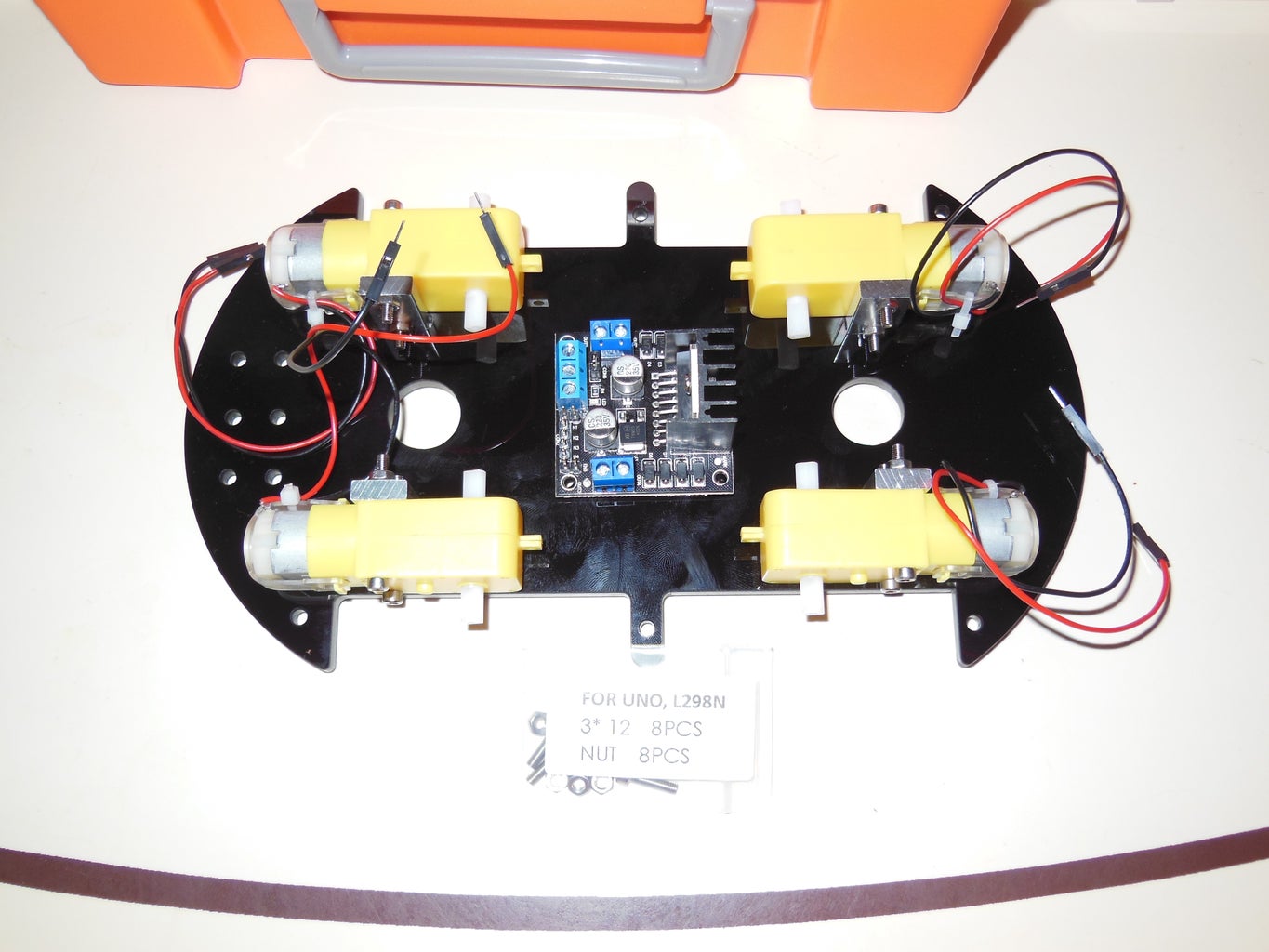

Pay attention to the direction of the motor driver board and the wiring.
Do not over tighten this board. You may damage it!
Step 4: Install the Line Tracking Module.



Step 5: Install the Arduino Uno R3 and the Extension Board
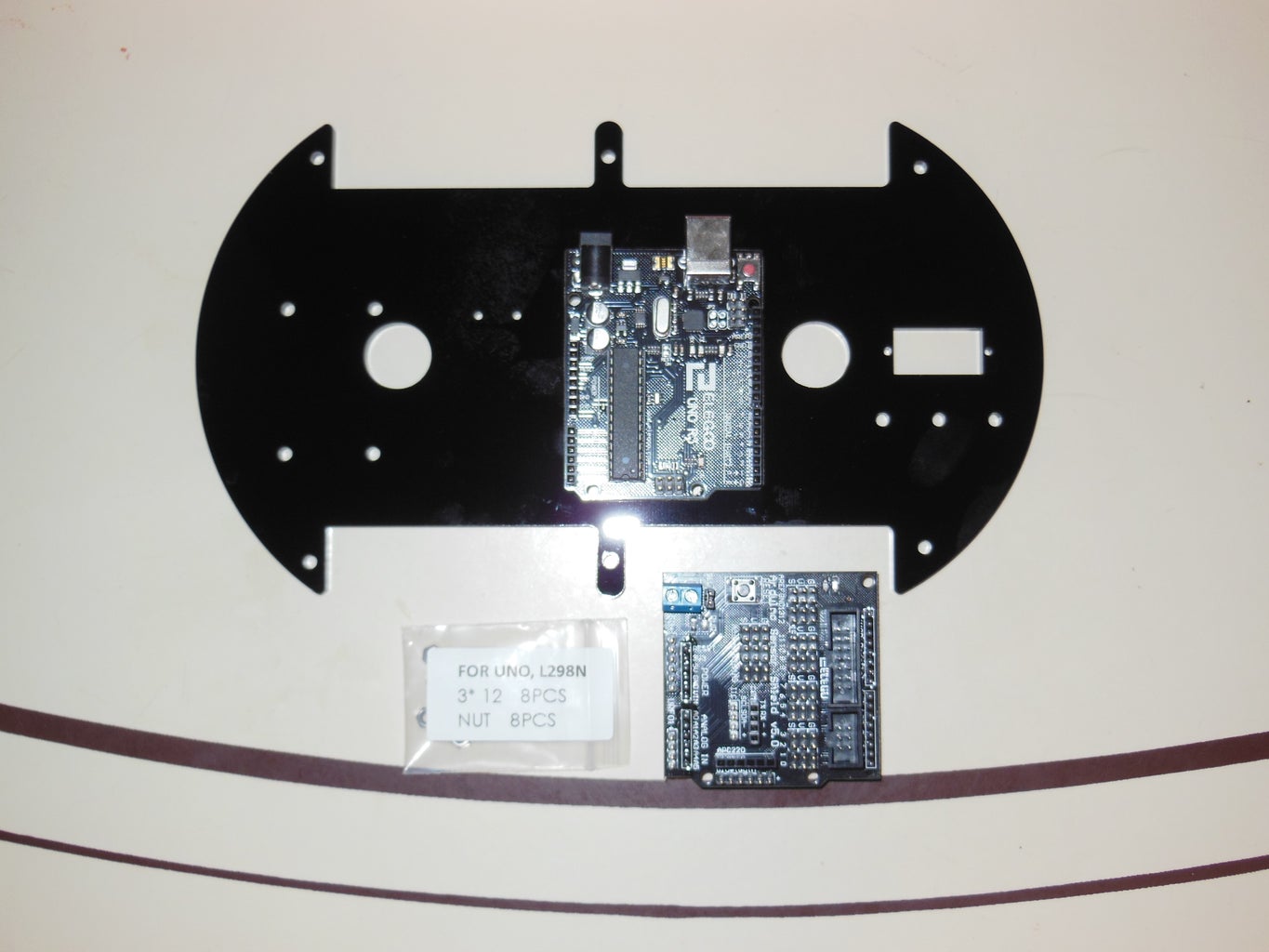

Install the Arduino Uno R3 and the Extension board on the top base plate.
Do not over tighten the Arduino Uno R3 board you may damage it.
Step 6: Install the IR Reciver and the Battery Case.


Do Not over tighten the IR receiver board.
My IR receiver doesn't sit flat after I tightened the screws. I bent the IR receiver a little so it pointed up move. Be careful you do not short it out if you bend it.
Do not over tighten the battery case.
Step 7: Install the Servo With the Ultrasonic Sensor





Be careful inserting the servo into the mounting plate and the base plate. Its a tight fit and you don't want to damage the wiring.
Do not over tighten the ultrasonic sensor you may damage it.
Plug the servo in to the digital 3 pin as shown.
You will connect the ultrasonic sensor later.
Step 8: Install the Copper Cylinders and Wire Up the Rest of the Motor Driver Board.




Install the copper cylinders on the bottom base plate.
Install the power from the batter case to the motor driver board.
Install 6 wires to control the board.
The six wires then fit through a hole on the top base plate.
You now can add the screws for the top base plate to the copper cylinders. I only installed two in case I had to take it back apart.
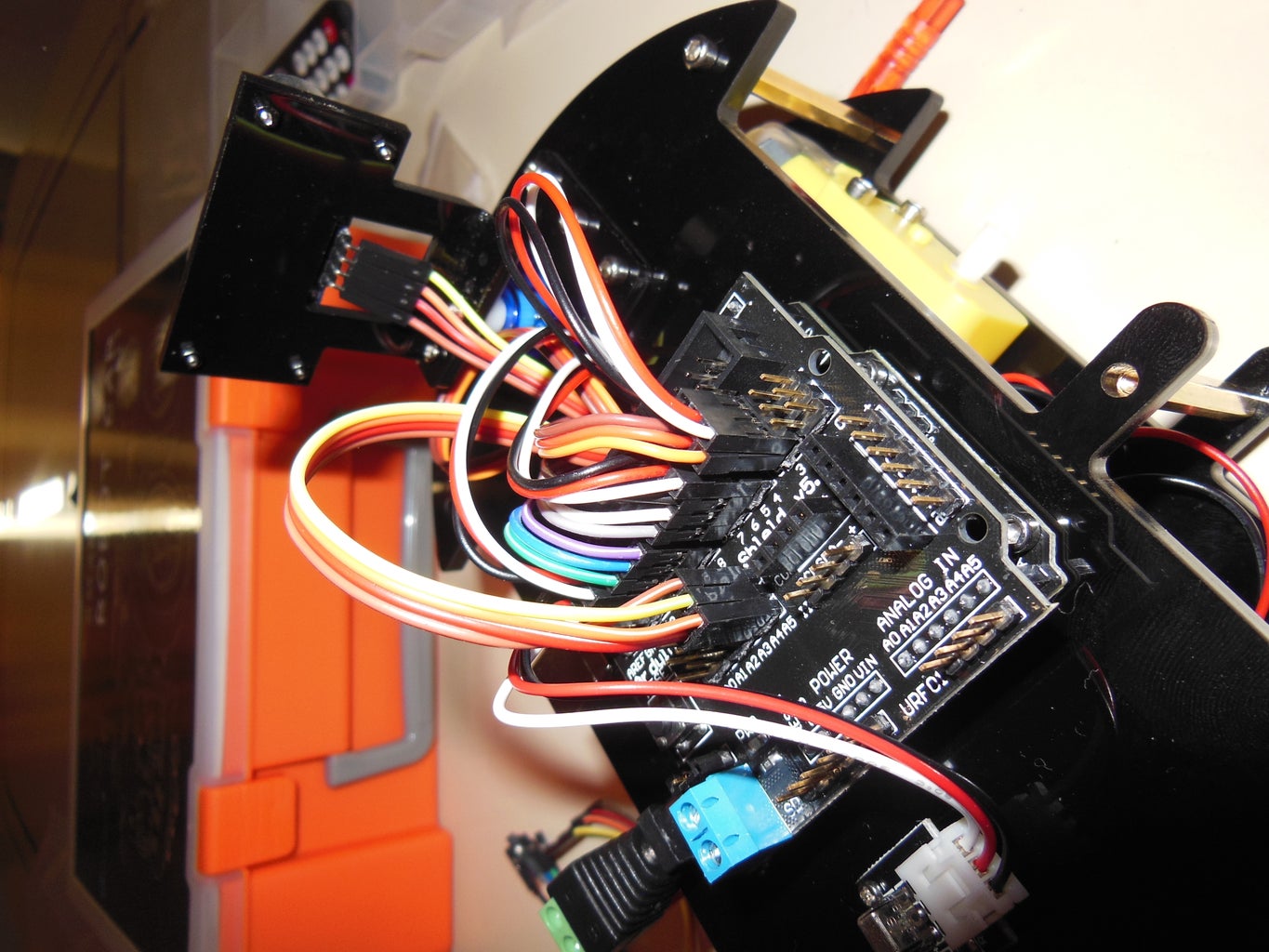
Connect all six wires to the expansion board
digital pins 5, 6, 7, 8, 9, 10.
Step 9: Wire Up the Line Tracking Modules.



Sensor one connects to digital 11
sensor two connects to digital 4
Sensor three connects to digital 2
Step 10: Wire Up the IR Receiver.

IR receiver connects to digital pin 12.
Step 11: Wire Up the Ultrasonic Sensor.

GND to Ground
Echo to A4
Trig to A4
VCC to +5VDC
Step 12: Install Blu Tooth and Finish Installing Screws to Copper Cylinders.

Blu tooth Extension board.
RXD to TX
TXD to RX
GND to - (Ground)
VCC to + (+5VDC)
If you haven't already installed all the screws to hold the top and bottom base plates to geather you can now install them and tighten them.
Step 13: Install Wheels.

Install the wheels. You may need to or want to glue them on. Mine kept falling off. I use some Cement for Plastic Models.
After you install the wheels make them as straight as possible and tighten the screws holding the motors the the bottom base plate.
Step 14: Its Complete and Ready to Upload Some Codes!





The car comes with the following codes...
Lesson 1 Make Car Move
- Auto Go
- Forward Back
- Left Wheel Rotation
- Right Wheel Rotation
Lesson 2 Bluetooth Car
- Bluetooth Blink
- Bluetooth Car
Lesson 3 Infrared Remote Control Car
- Infrared Blink
- Infrared Remote Control Car
Lesson 4 Obstacle Avoidance Car
Lesson 5 Line Tracking Car
Step 15: Modification.






I added lights that I can control with the blutooth code.
Note adding more lights or other parts that consume electricity will shorten the run time.
Step 16: Furture...





I have been thinking about added the Raspberry Pi and a camera to stream video back to my android tablet.
with a pan and tilt camera mount.
I also am thinking about adding a Arduino Mega with a GPS module. So I can set a detestation point and have the car drive there by its self avoiding obstacles.
.