

Introduction: LittleBot Budget: Simple Arduino Robot












With the LittleBot Budget we wanted to make it as easy as possible for kids to get started with robots. So we boiled a robot down to its very essence. A way to move, a way to think, and a way to see. Once those are in place you have a robot that you can do a surprisingly large amount with. And it is affordable enough that any classroom, group, or individual and get and build a whole mess of the them, opening up robotics to anyone who is interested.
But we went a step further. Once we had the basic robot created. We designed a way to easily expand it. So the robot can grow as the student's knowledge and skill grows. This currently includes a whole set of 3D printed expansions and arduino tutorials which can be used for free to expand the LittleBot Budget.
The LittleBot is available on Kickstarter and deliveries will begin in December 2018.
Step 1: Parts and Pieces


The LittleBot Budget can be purchased as a kit, or you can order the individual mechanical and electrical parts and 3D print the rest yourself.
- LittleBot Budget 3D Printed Base
- LittleBot Budget Arduino Control Board
- Arduino Continuous Rotation Servo w/ horn screw and servo horn (2)
- LittleBot Budget 3D Printed Wheel (2)
- O-Ring (2)
- Arduino Ultrasonic Sensor HC-SR04
- 6V AA Arduino Battery Pack
Recommended Tools/Parts:
- Small Phillips Screw Driver
- AA Battery (4)
Step 2: Attach the Arduino to the Base



The required parts are the LittleBot Budget Base and the Arduino Control Board.
- While the on/off switch is facing outwards from the Arduino slot, slide the Arduino board into the open-air slot on the top of the LittleBot Budget Base.
- During the first installation of the board, it may be stiff and somewhat difficult to push in the board. Do not worry, for a bit of force is usually required.
- When the Arduino Board reaches the end of the slot, the board should fit nice and snug.
Step 3: Build the Wheels



- The parts required for this are the O-Rings, Servo Horns (White Piece not shown), and the 3D Printed Wheels.
- Upon inspection of the wheels, there should be grooves cut out for the O-Ring to fall into place.
- Simply press the O-Ring along the outside of the wheel, and it will fall into place.
- Some force will be required to stretch the O-Ring over the lip of the wheel, but once it is over it will fall into place.
- Do the same for the other wheel.
- Next is the installation of the Servo Horn into the wheel slot.
- Take a wheel and set it so the servo horn slot is facing upwards.
- Take the Servo Horn, with the circular extension facing downwards, and press the horn into the wheel as shown.
- The circular extension of the Servo Horn should rest comfortably in the circular cutout of the wheel.
- Do the same for the other wheel.
Step 4: Install the Servo Motors in to the Base





- The parts required for this are the two Servo Motors and the LittleBot Budget Base, already equipped with the Arduino Board.
- First, take one of the servos and thread the connecting cable into the cutout on the left side of the base. The cable should come out the rear of the base.
- Next, set the Servo Motor in place oriented with the white circle as close to the rear as possible.
- Once oriented properly as shown above, give the servo a push strong enough to set the rest of the servo inside the base. You will know when the servo is in all the way when the two plastic protrusions on the sides of the motor come in contact with the base.
- Next, do the same for the other side, while making sure that the servo is oriented so the white circle is as close to the rear as possible.
Step 5: Attach the Wheels to the Servo Motors





- The parts required for this step are the LittleBot Budget Base with the servos installed, the previously constructed wheels, and the two Horn Screws. You will also need a small Phillips screw driver for the screws.
- Take one of the wheels and set it down with its back facing upward. Then, take the LittleBot Budget Base and align the teeth of the servo with the teeth of the Servo Horn.
- Pressing the two together should align the teeth in place, and roughly attach the wheel to the servo.
- Next, you want to set once of the Horn Screws in the middle of the Servo Horn that connects to the servo. Screw in the Horn Screw tight enough so the wheel won’t fall off.
- Do the same for the other side.
Step 6: Step 6: Installing the Ultrasonic Sensor


- The parts required are the previously assembled base and the Ultrasonic Sensor module.
- Take the Ultrasonic sensor and insert the four pins into the open four-pin slot at the front of the LittleBot Budget base. When inserting the Ultrasonic Sensor, make sure the two sensors or “eyes” are facing outwards from the Arduino Board.
Step 7: Step 7: Inserting the Batteries
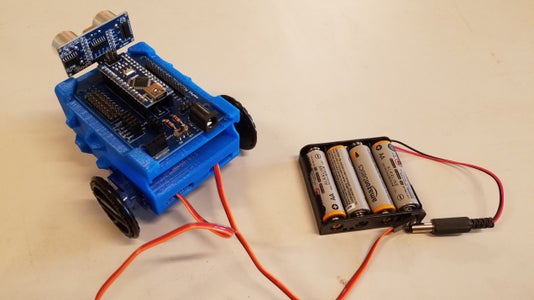

- The parts required for this step are the battery pack, for AA batteries, and the LittleBot Budget Base.
- First, insert the batteries into the battery pack.
- Next, slide the battery pack into the open slot in the rear of the base, with the battery pack cable sticking out of the end.
Step 8: Arduino Upload

- Download the latest verion of Walter_OS from the LittleBots Website Downloads Page.
- Open Walter_OS in the Arduino IDE
- Select the Arduino Nano from the List of Boards
- Upload Walter_OS to the Arduino
Note: Make sure that the bluetooth module is not yet connected to the board when you are attempting to upload code. Bluetooth and USB interfere with each other.
Step 9: Wiring



- All of the physical components should now be attached to the LittleBot Budget.
- Reference the diagram of the connections and follow the direction below.
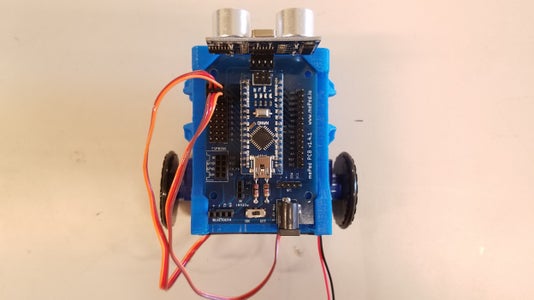
- Take the cable from the left servo motor and plug it into the “S1” pins. From left to right, the color of the wires should be brown, red, and orange. (Note: The Orange = Signal, Red - "+", Black = "-". All of the symbols are marked on the board so you can always remember how to connect the servo)
- Take the cable from the right servo motor and plug it into the “S2” pins. From left to right, the color of the wires should be brown, red, and orange.
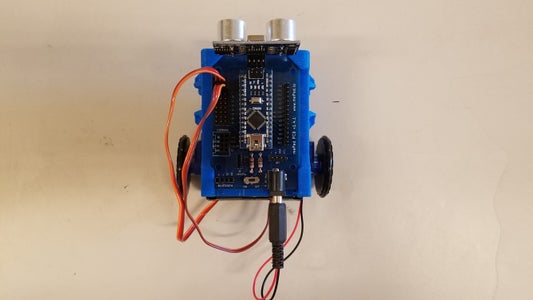
- Finally, plug the connector from the battery pack into the corresponding circular port in the Arduino Control Board.
- If you have a Bluetooth LittleBot Budget, you may now plug in the bluetooth chip. Make sure that the symbols on the Chip, match with the symbols on the board.
Congratulations! You’ve completed the physical assembly of the LittleBot Budget! Now all you need to do is upload the Arduino code to the LittleBot Budget for it to operate!
Step 10: Final Notes
You have built the LittleBots Budget. Enjoy reprogramming it and designing new expansions for it.
If you would like to 3D print extra attachments for the LittleBot Budget you can find them all on the LittleBot Thingiverse Page
If you just want to drive the LittleBot Around you can download the LittleBot App. Make sure that you have uploaded the correct firmware as detailed in the earlier step. Also follow this video for how to pair the bluetooth.
The Littlebot Budget is available on Kickstarter for preorders and deliveries start in December.
