

Introduction: Portable Magnetometer





A magnetometer, sometimes also called Gaussmeter, measures the strength of the magnetic field. It is an essential tool to test the strength of permanent magnets and electromagnets and to understand the field shape of nontrivial magnet configurations. If it is sensitive enough it can also detect if iron objects got magnetized. Time-varying fields from motors and transformers can be detected if the probe is fast enough.
Mobile phones usually contain a 3-axis magnetometer but they have been optimized for the weak earth magnetic field of ~1 Gauss = 0.1 mT and saturate at fields of a few mT. The location of the sensor on the phone is not obvious, and it is not possible to place the sensor inside narrow apertures such as the bore of an electromagnet. Moreover, you might not want to bring your smartphone close to strong magnets.
Here I describe how to make a simple portable magnetometer with common components: a linear hall sensor, an Arduino, a display and a push-button. The total cost is less than 5EUR, and the sensitivity of ~0.01mT on a range of -100 to +100mT is better than what you might naively expect. To get accurate absolute readings, you’ll need to calibrate it: I describe how to do that with a home-made long solenoid.
Step 1: The Hall Probe
The Hall-effect is a common way to measure magnetic fields. When electrons flow through a conductor in a magnetic field they get deflected sideways and thus create a potential difference on the sides of the conductor. With the right choice of semiconductor material and geometry, a measurable signal is produced that can be amplified and to provide a measure of one component of the magnetic field.
I use the SS49E because it’s cheap and widely available. A few things to note from its datasheet :
- Supply voltage: 2.7-6.5 V, so perfectly compatible with the 5V from the Arduino.
- Null-output: 2.25-2.75V, so approximately halfway between 0 and 5V.
- Sensitivity: 1.0-1.75mV/Gauss, so it will require calibration to get precise results.
- Output voltage 1.0V-4.0V (if operated at 5V): well covered by the Arduino ADC.
- Range: +-650G minimum, +-1000G typical.
- Response time 3mus, so it can sample at a few tens of kHz.
- Supply current: 6-10mA, low enough to be battery-operated.
- Temperature error: ~0.1% per degree C. Seems little but a 0.1% offset drift gives a 3mT error.
The sensor is compact, ~4x3x2mm, and measures the component of the magnetic field that is perpendicular to its front face. It will output a positive for fields that point from the back side to the front side, for example when the front is brought to a magnetic south pole. The sensor has 3 leads, +5V, 0V and output left to right, when seen from the front.
Step 2: Required Material
- SS49E linear Hall sensor. These cost ~1EUR for a set of 10 online.
- Arduino Uno with prototype board for prototype or Arduino Nano (without headers!) for portable version
- SSD1306 0.96” monochrome OLED display with I2C interface
- A momentary push-button
To construct the probe:
- An old ballpen or other sturdy hollow tube
- 3 thin stranded wires somewhat longer than the tube
- 12cm of thin (1.5mm) shrink tube
To make it portable:
- A large tic-tac box (18x46x83mm) or similar
- A 9V-battery clip
- An on/off switch
Step 3: First Version: Using an Arduino Prototype Board

Always prototype first to check that all the components work and that the software is functional! Follow the picture and to connect the Hall probe, the display and the null-button: The Hall probe needs to be connected to +5V, GND, A0 (left to right). The display needs to be connected to GND, +5V, A5, A4 (left to right). The button needs to make a connection from ground to A1 when pressed.
The code was written and uploaded using the Arduino IDE version 1.8.10. It requires to install the Adafruit_SSD1306 and Adafruit_GFX libraries Upload the code in the attached sketch.
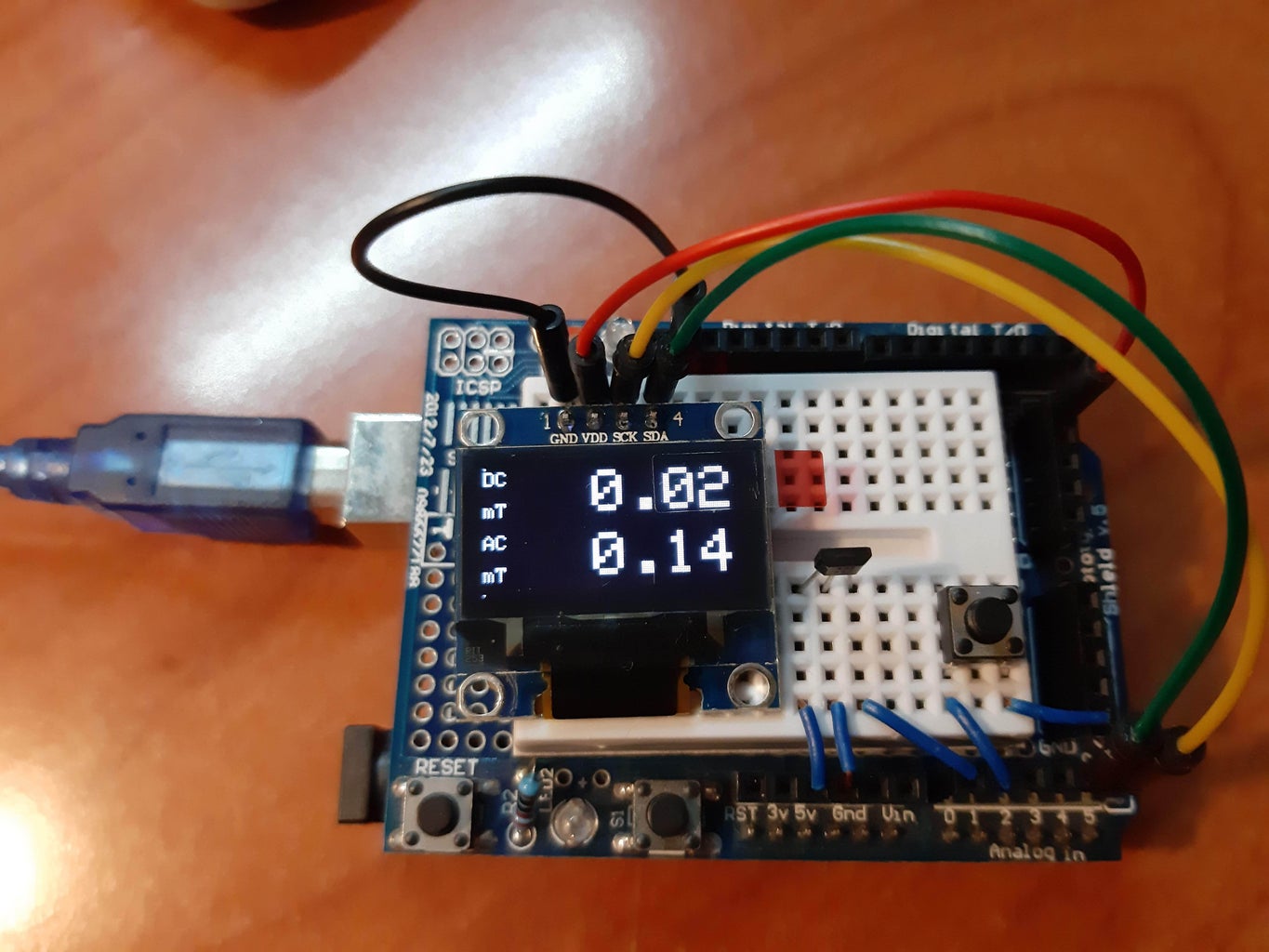
The display should show a DC value and an AC value.
Attachments

Step 4: Some Comments About the Code
Feel free to skip this section if you’re not interested in the inner workings of the code.
The key feature of the code is that the magnetic field is measured 2000 times in a row. This takes about 0.2-0.3 seconds. By keeping track of the sum and of the squared sum of the measurements, it is possible to calculate both the mean and the standard deviation, which are reported as DC and AC. By averaging a large number of measurements, the precision increases, theoretically by sqrt(2000)~45. So with a 10-bit ADC, we can reach the precision of a 15-bit ADC! It makes a big difference: 1 ADC count is 5mV, which is ~0.3mT. Thanks to the averaging, we improve the precision of from 0.3mT to 0.01mT.
As a bonus, we also get the standard deviation, so fluctuating fields are identified as such. A field fluctuating at 50Hz does ~10 full cycles during the measurement time, so its AC value can be well measured.
After compiling the code I get the following feedback: Sketch uses 16852 bytes (54%) of program storage space. Maximum is 30720 bytes. Global variables use 352 bytes (17%) of dynamic memory, leaving 1696 bytes for local variables. Maximum is 2048 bytes.
Most of the space is taken up by the Adafruit libraries, but there is plenty of space for further functionality
Step 5: Preparing the Probe


The probe is best mounted at the tip of a narrow tube: this way it can be easily placed and kept in position even inside narrow apertures. Any hollow tube of a nonmagnetic material will do. I used an old ballpen that gave a perfect fit.
Prepare 3 thin flexible wires that are longer than the tube. I used 3cm of ribbon cable. There is no logic in the colors (orange for +5V, red for 0V, grey for signal) but with just 3 wires I can remember.
To use the probe on the prototype, solder some pieces of stripped solid-core hookup wire o the end and protect them with shrink tube. Later this can be cut off so that the probe wires can be soldered directly to the Arduino.
Step 6: Building a Portable Instrument

A 9V battery, the OLED screen and an Arduino Nano fit comfortably inside a (large) Tic-Tac box. It has the advantage of being transparent, to the screen is well readable even inside. All fixed components (the probe, the on/off switch and the push-button) are attached to the top, so that the whole assembly can be taken out of the box for changing battery or updating the code.
I was never a fan of 9V batteries: they are expensive and have little capacity. But my local supermarket suddenly sold the rechargeable NiMH version for 1 EUR each, and I found that they can be easily charged by keeping them on 11V through a 100Ohm resistor overnight. I ordered clips cheaply but they never arrived, so I took apart an old 9V battery to turn the top into a clip. The good thing about the 9V battery is that it’s compact and the Arduino runs well on it by connecting it to Vin. On +5V there will be a regulated 5V available for the OLED and for the Hall probe.
The Hall probe, the OLED screen and the push button are connected in the same way as for the prototype. The only addition is an on/off button between the 9V battery and the Arduino.
Step 7: Calibration



The calibration constant in the code corresponds to the number given in the datasheet (1.4mV/Gauss) , but the datasheet allows for a large range (1.0-1.75mV/Gauss). To get accurate results, we’ll need to calibrate the probe!
The most straightforward way to produce a magnetic field of a well-determined strength is to use a solenoid: the field strength of a long solenoid is: B=mu0*n*I. The vacuum permeability is a constant of nature: mu0=1.2566x10^-6 T/m/A. The field is homogenous and depends only on the density of windings n, and the current I, both of which can be measured with good accuracy (~1%). The quoted formula is derived for infinitely long solenoid, but is a very good approximation for the field in the center as long as the ratio of length to diameter, L/D>10.
To make a suitable solenoid, take a hollow cylindrical tube with L/D > 10 and apply regular windings with enameled wire. I used a PVC tube with and outer diameter of 23mm and wound 566 windings, than spanned 20.2 cm, resulting in n=28/cm=2800/m. The wire length is 42m and the resistance 10.0 Ohm.
Supply power to the coil and measure the current flow with a multimeter. Use either a variable voltage supply or a variable load resistor to keep the current under control. Measure the magnetic field for a few current settings and compare it to the readings.
Before calibration, I measured 6.04 mT/A while the theory predicts 3.50 mT/A. So I multiplied tthe calibration constant in line 18 of the code by 0.58. The magnetometer is now calibrated!
