Introduction: Reading RC Receiver PPM Signal Using Arduino





RC transmitter is very well suitable for the projects requires a wireless link as it has encrypted link with good range.
All RC receiver is made to drive servo motors. so there are 3 pins for each channel: ground, Vcc, and signal. here special kind of signal is used. It sends pulses at some interval. When servo receives 1.5ms pulse it sets to 90 degrees and by varying this value from 1-2ms servo goes to minimum and maximum value.
(In above photo a 6 channel receiver is shown with PPM pin)
So easy method is to measuring pulse width on each pin and map that data as per requirement. but here problem is that:
- For each channel of the receiver, we need to connect a wire to Arduino pin.
- this not only requires lots of connection but also consume lots of pins on an Arduino.
- Most of Arduino just has 2 interrupt pin so if we uses more than 2 channel read it add some delay to our code which may be problematic for some application.
To solve this problem many receivers comes with an extra pin called PPM. this PPM pin transmits data of all channel in a single signal.
Step 1: How PPM Pin Signal Composed:
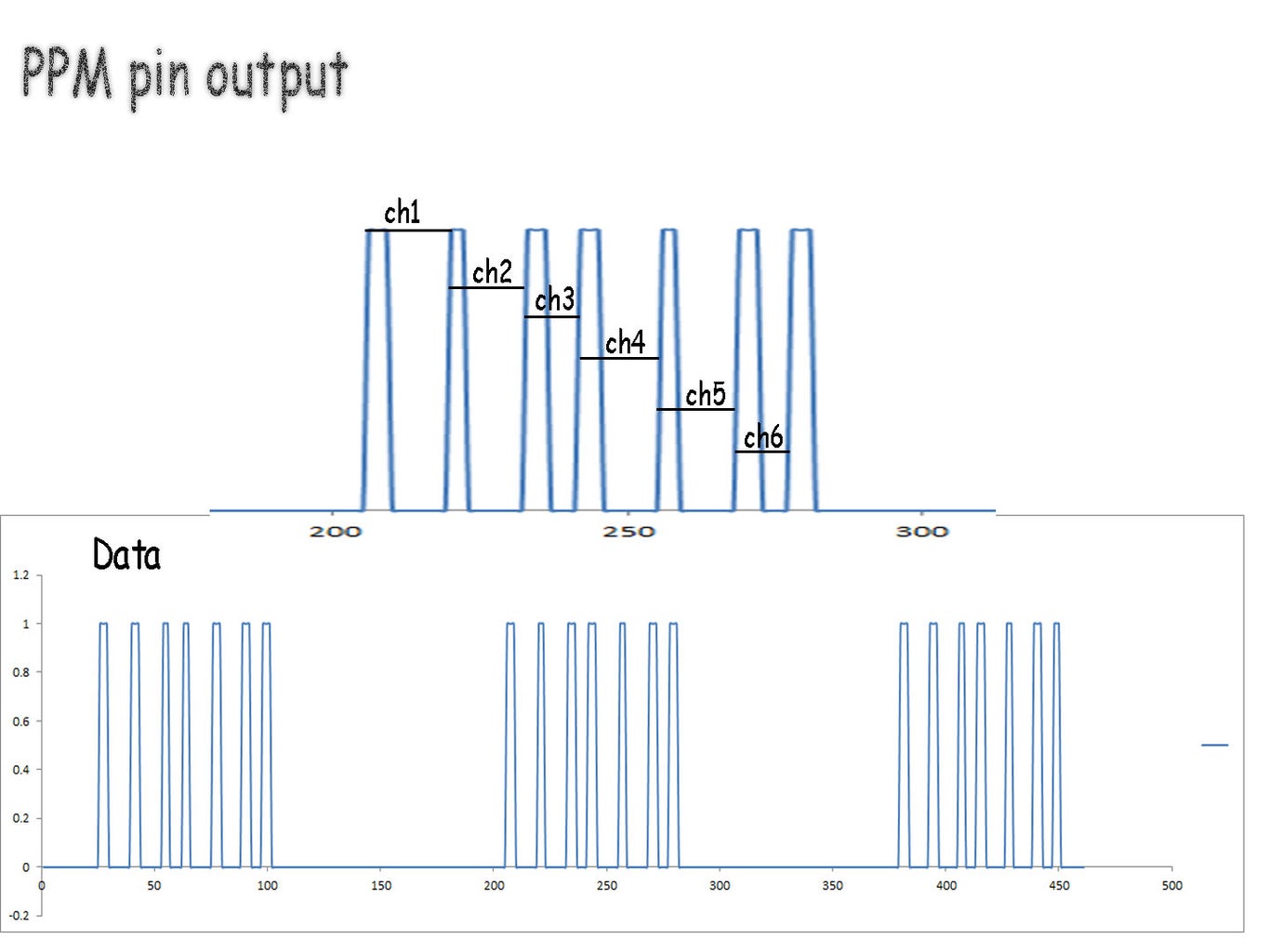

This signal consists of data packets separated by blank space.
Here space in between peaks represents the value of the channel. in this case, I have used 6 channel receiver so there are 7 pulses.
So in our code first, we need to detect separation space and then start recording data from the pulses for each channel.
As can be seen in the second image,
all data is separated with approx 11500 microseconds of time. than 6 values are for each channel.
Step 2: Making and Using Code:
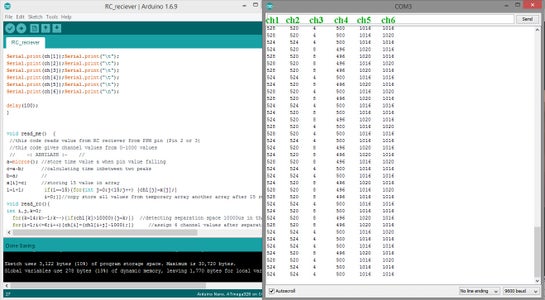
Here read_me() specified as function:
a=micros(); c=a-b; b=a; x[i]=c; i=i+1;
if(i==15){for(int j=0;j<15;j++) {ch1[j]=x[j];} i=0; } }
this part runs on interrupt pin and take 15 time values and store it in array.
another function read_rc()
this part look for any space which is higher than 10000microsecond, in our case it detects separation space and as it detects that space code moves to next section.
after this space next 6 values are for each channel position it is stored in array named ch[ channel no],
here ch[1], ch[2], ch[3], ch[4], ch[5], ch[6] represents value of each chanel.
Attachments

Step 3: Finally...
As we are using PPM signal with interrupt
- This code do not add delay to our main functions
- It consumes just 1 pin from Arduino