Introduction: Simple Bots: Clack





Clack teaches the value of inconsistency and imperfection. In an ideal world, if Clack were a perfectly-built bot, all of the spoons would be attached at the same length, both of the motors would spin at the same speed, both spoon assemblies would be perfectly aligned, and the bot would drive forwards in a perfectly straight line. In my estimation, this would be entirely boring. Fortunately, we do not live in an ideal world and clack is by no means perfect. By having wheels made of spoons of different length that are running out of synch from one another and at slightly different speeds, Clack ends up exhibiting unpredictably fun behavior. Rather than simply going in a boring straight line, Clack explores to and fro.
If you like this bot, you will love all the robots in my book Homemade Robots!
Step 1: Go Get Stuff

You will need:
(x2) continuous rotation servos modified for direct drive**
(x8) plastic spoons
(x1) assorted zip ties
(x1) small trash bin
**Modify your servos for direct drive here
Note: Some of the links on this page are affiliate links. I use the money I make from these links to fund future projects. This does not change the cost of these items for you. If you want me to recommend any alternate suppliers for any of the parts, let me know in the comments below.
Step 2: Drill





Drill a hole in each of the servo horn's four corners.
Drill another four holes 1/4" toward the servo horn's center.
Repeat on the second servo.
Step 3: Remove



Remove the screw holding the servo horn on and pull the two apart.
Step 4: Mark


Make a mark that is 1-1/2" from the opening of the trash can and centered on the longer side of the trash bin.
Make an identical mark on the opposite face of the trash bin.
Step 5: Drill





Drill each of these marks with a 1/8" drill bit and then widen it with a 3/4" drill bit.
Step 6: Mark


Place the servo shaft down into the 3/4" hole and center it, with the long side of the servo parallel to the bin's opening.
Use the servo's mounting holes to make four marks for drilling.
Repeat this process on the opposite side.
Step 7: Drill



With a 1/8" drill bit, drill through all four marks on each side of the case.
Step 8: Attach




Place the servos on the inside of the bin, with their shafts pointing out through the 3/4" hole.
Zip tie them in place using the mounting holes.
Step 9: Spoon!










Using the servo horn as a drilling guide, drill two holes into each of the four spoons.
Place the servo horn's mounting screw into the mounting hole and then zip tie them, respectively, to each arm of the servo horn (trying to leave access to the screw head if possible).
Don't worry about free-forming the relative lengths of the spoons or it being inexact. Inconsistency is what makes these bots interesting.
Repeat the process.
Step 10: Reattach

Put the servo horns back onto the motor and fasten the mounting screw.
If you didn't leave access to the screw head, carefully and gently drill a 1/8" hole downward to make an access port to accomplish this..
Step 11: Wire
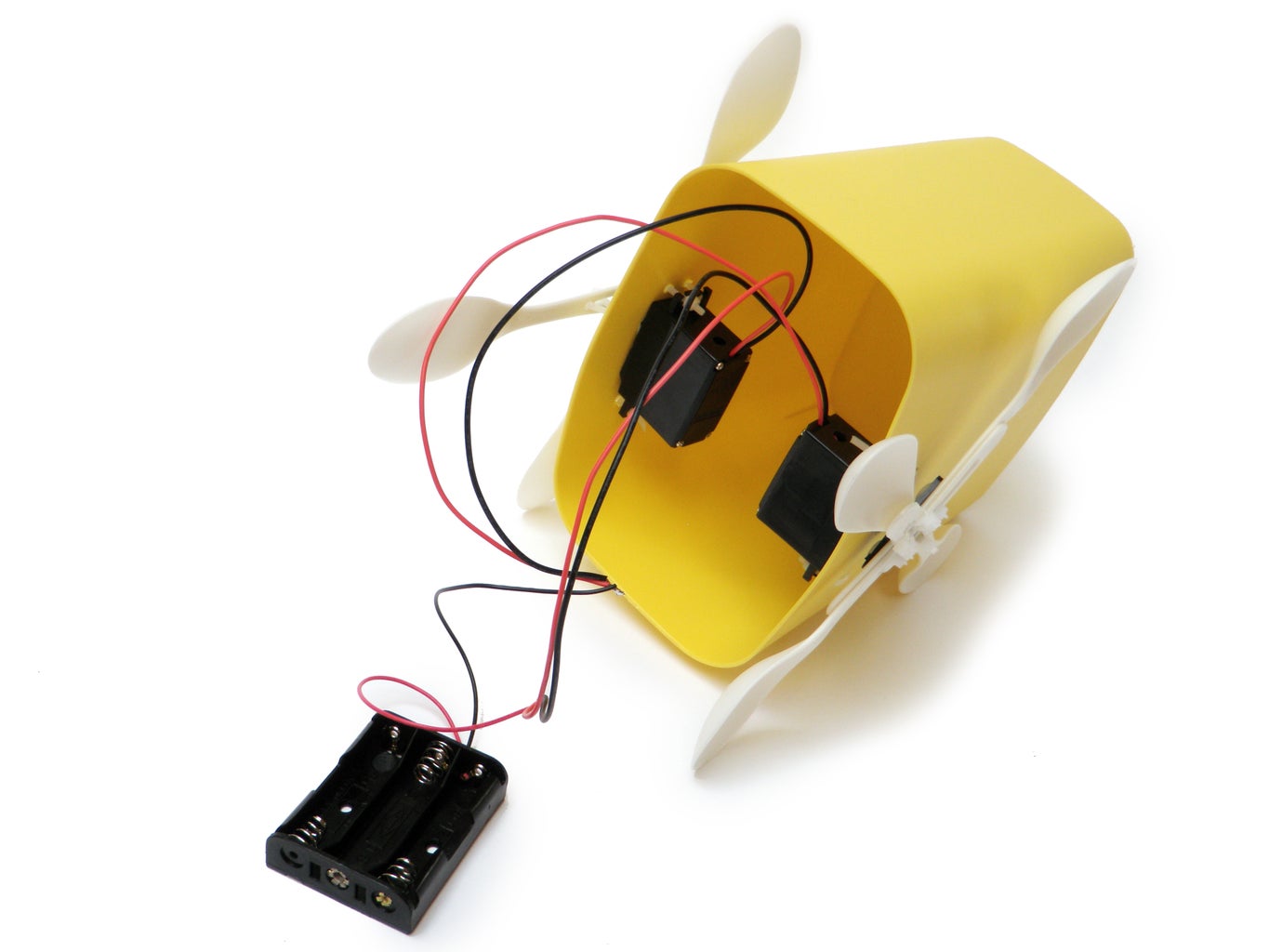

Solder the red wire from one motor and the black wire from the other to the red wire on the battery holder.
Solder the remaining wire from each motor to the black wire on the battery holder.
If you are unhappy with the direction the motors are spinning, reverse the power connection.
Step 12: Neaten
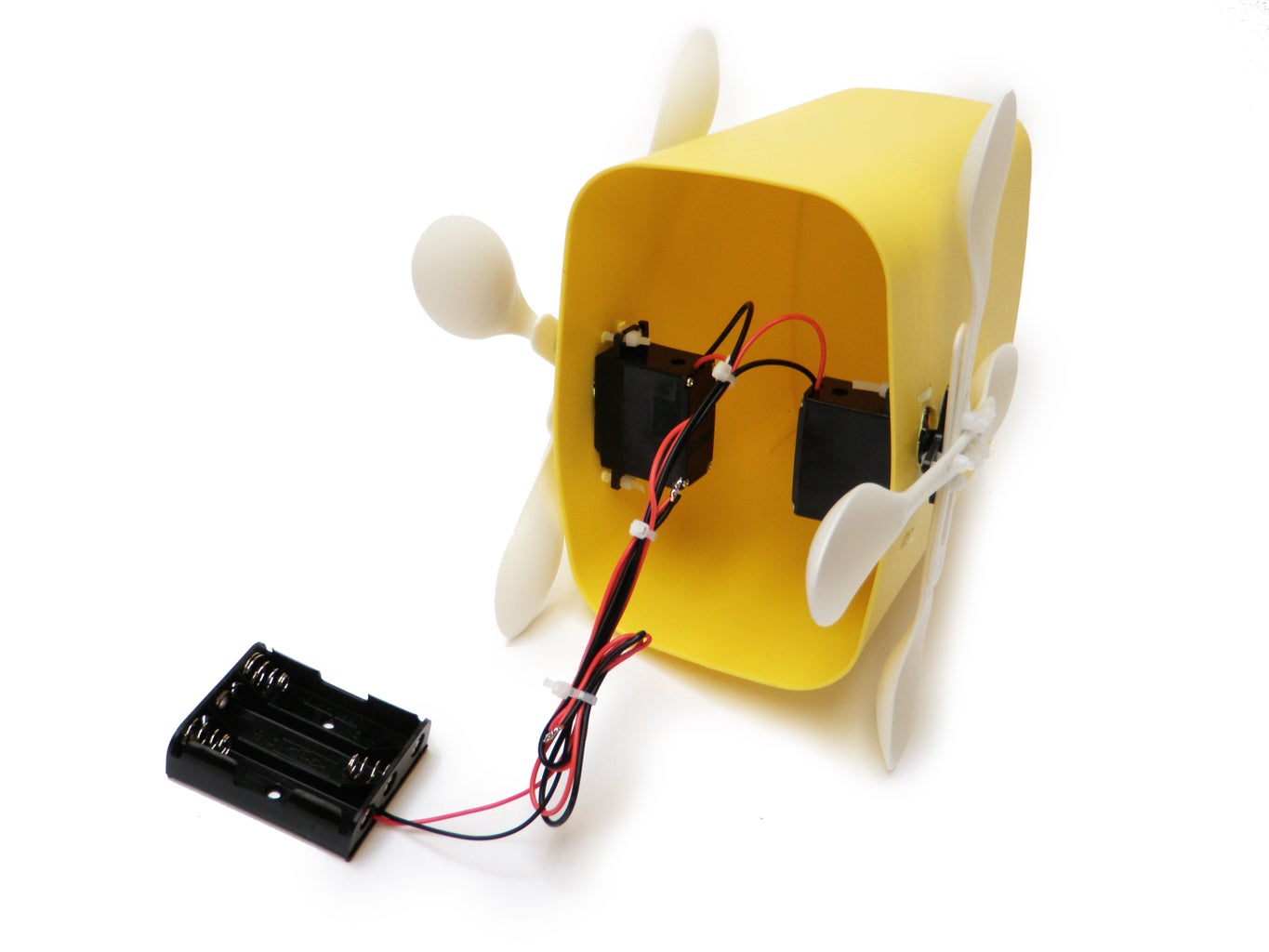
Zip tie all of the wires neatly together in such a way that the solder connections will never cross.
Step 13: Power


Insert batteries into the battery holder and slide it into the back of the bot's body.
Let it loose.

Did you find this useful, fun, or entertaining?
Follow @madeineuphoria to see my latest projects.